Configuring the receiver as a rover
Applicable receivers: All receivers
When setting up a rover, Trimble recommends the following steps:
-
Reset the unit to use the default application file:
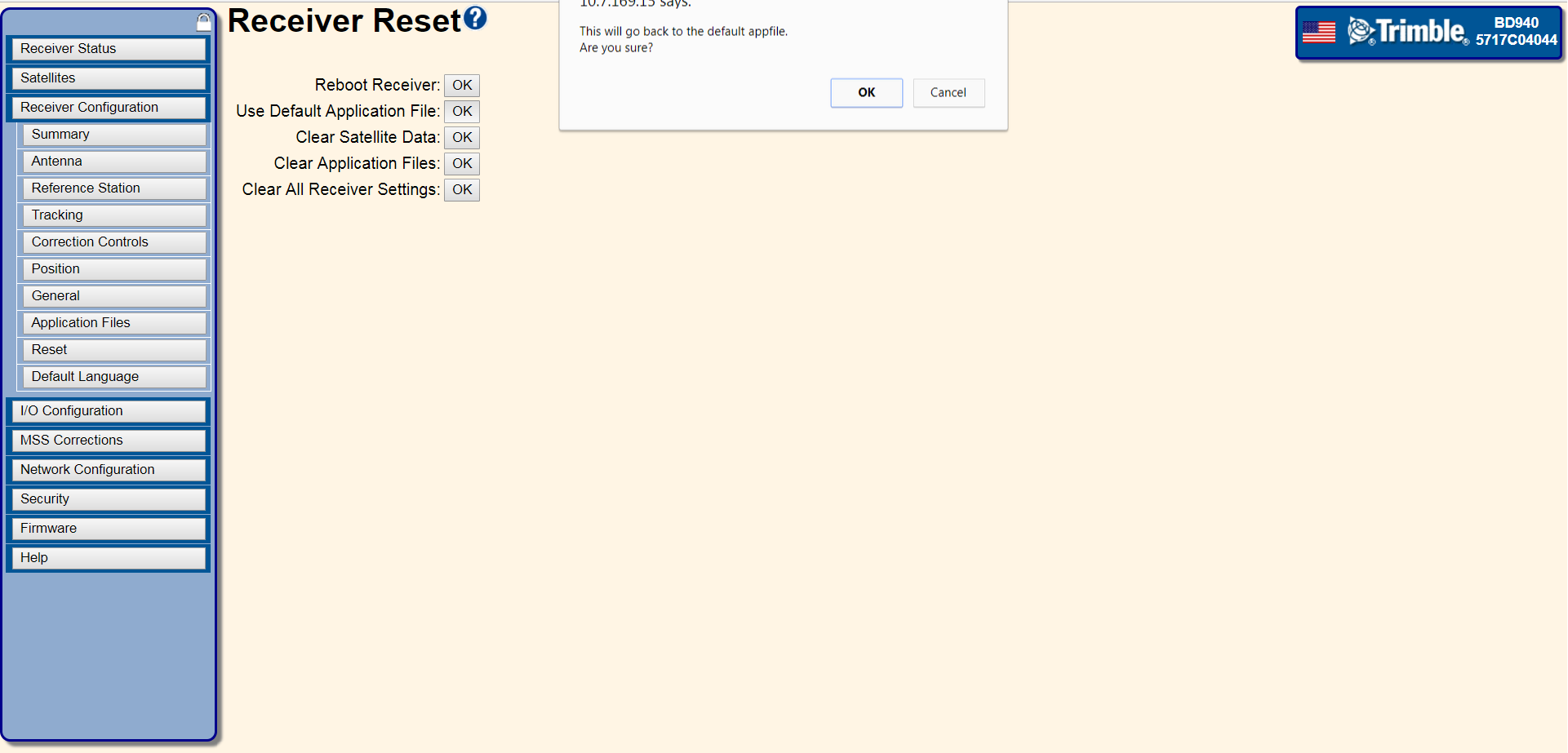
-
Set the Operation Mode to Rover:

-
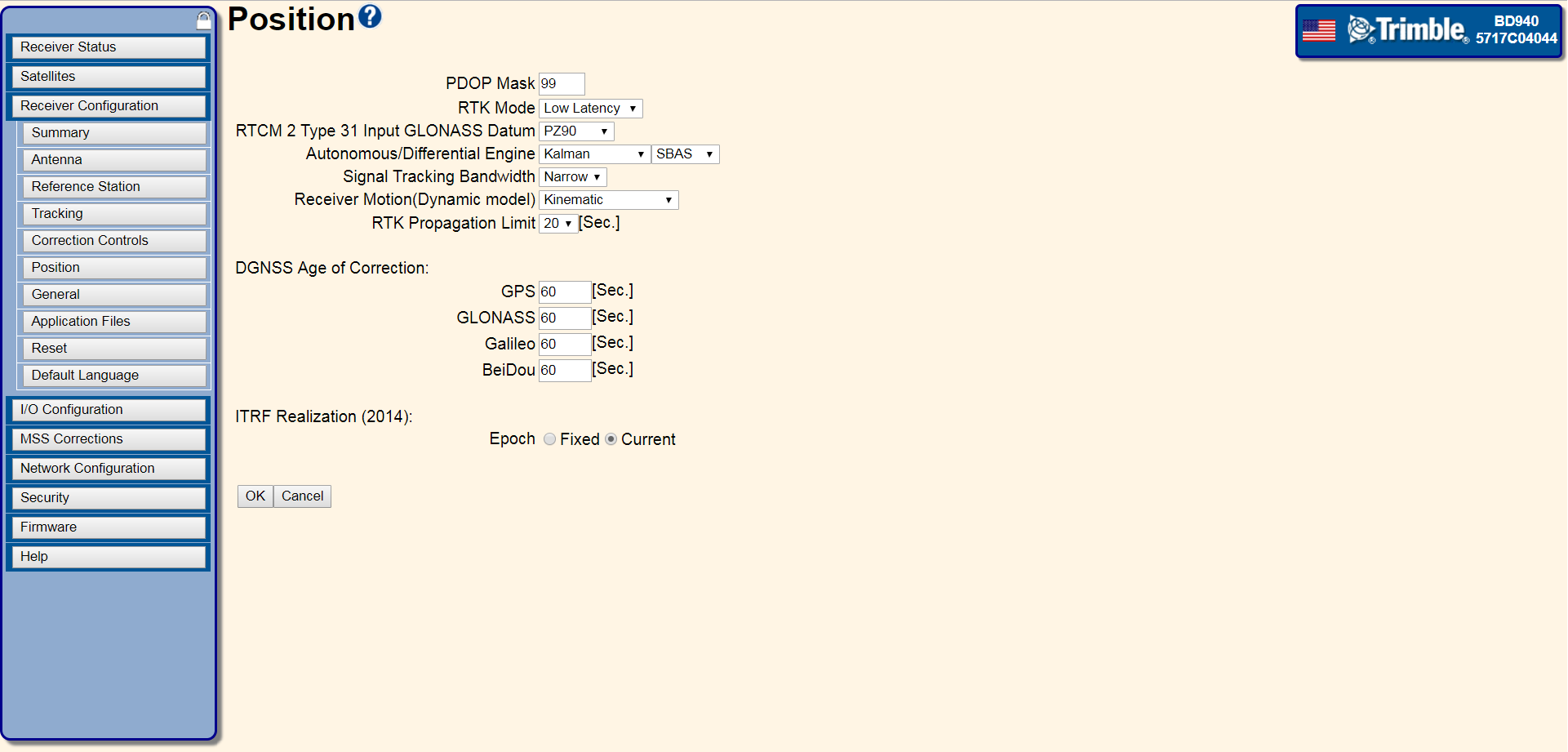
Set the RTK Motion to Kinematic:
The 64h command to reset the receiver to defaults and put the unit into a kinematic mode is:
02 00 64 0A 00 00 00 03 00 01 01 0A 01 00 7E 03Where:
RECORD BYTES: 0A 01 00Decode as:
RECORD TYPE: 10 (0Ah (10) Static Kinematic)RECORD LENGTH: 1Static/Kinematic Mode: 0 (Kinematic)NOTE – The highlighted bit is set to 01 only in this command (since it resets the unit to defaults). In the following steps this bit is set to 00 since a reset at that point would reset all of the settings that have already been configured.
-
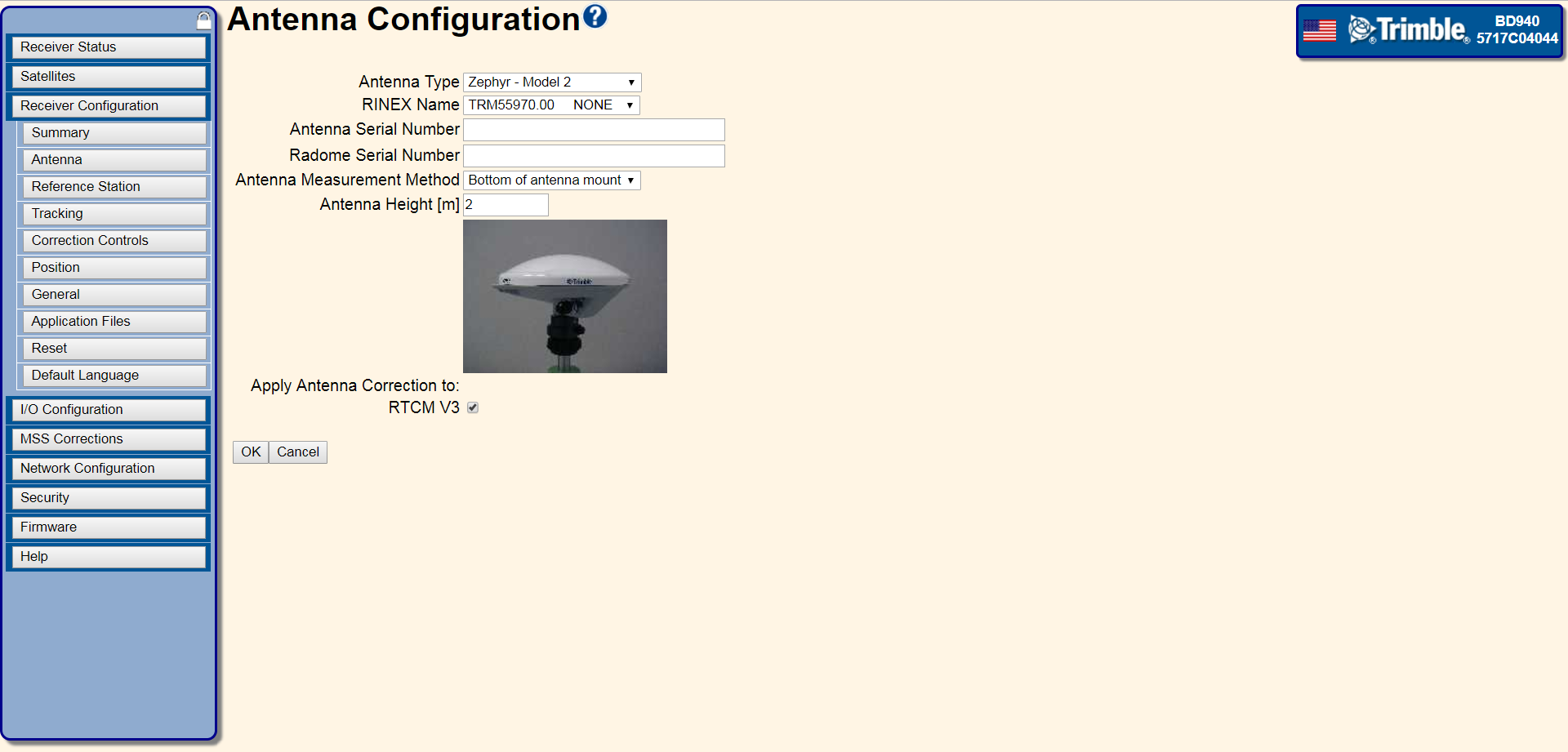
Set the antenna type, antenna height, and the measurement method:
The 64h command to set these base parameters is:
02 00 64 15 00 00 00 03 00 01 00 08 0C 3F B5 94 AF 40 00 00 00 00 B8 00 00 C0 03Where:
RECORD BYTES: 3F B5 94 AF 40 00 00 00 00 B8 00 00Decode as:
RECORD TYPE: 8 (08h (8) Antenna)RECORD LENGTH: 12Antenna Height (meters): 0.0843Antenna Type: 184(Reserved - set to 0x00): 0(Reserved - set to 0x00): 0NOTE – In this example, because the bottom of antenna mount (the ARP) was selected, the antenna height accounts for the distance between the antenna phase center (APC) and the ARP. However, the output messages are always given for the position of the APC.
-
Configure any output messages:
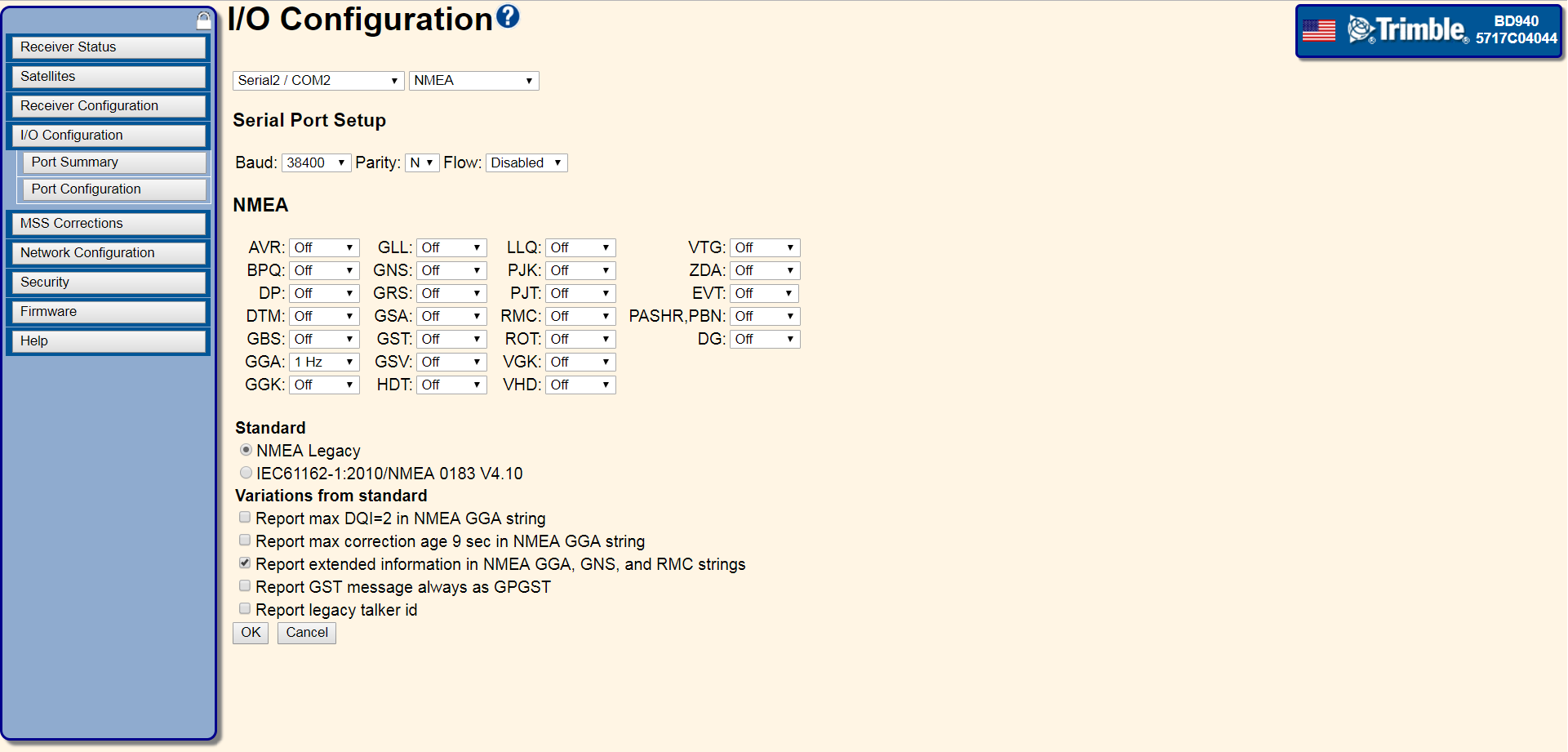
The 64h command to set these base parameters is:
02 00 64 19 00 00 00 03 00 01 00 02 04 01 05 00 00 07 04 06 01 03 00 07 04 0D 01 03 00 BE 03Where:
RECORD BYTES: 02 04 01 05 00 00Decode as:
RECORD TYPE: 2 (02h (2) Serial Port Baud Format)RECORD LENGTH: 4PORT INDEX (zero based): 1 (Serial port 2)BAUD RATE: 5 (38.4K baud (default))PARITY: 0 (No Parity)FLOW CONTROL: 0 (None)Where:
RECORD BYTES: 07 04 06 01 03 00Decode as:
RECORD TYPE: 7 (07h (7) Output Message)RECORD LENGTH: 4OUTPUT MESSAGE TYPE: 6 (NMEA_GGA)PORT INDEX (zero based): 1 (Serial port 2)FREQUENCY: 3 (1 Hz)OFFSET: 0Where:
RECORD BYTES: 07 04 0D 01 03 00Decode as:
RECORD TYPE: 7 (07h (7) Output Message)RECORD LENGTH: 4OUTPUT MESSAGE TYPE: 13 (NMEA_GST)PORT INDEX (zero based): 1 (Serial port 2)FREQUENCY: 3 (1 Hz)OFFSET: 0 -
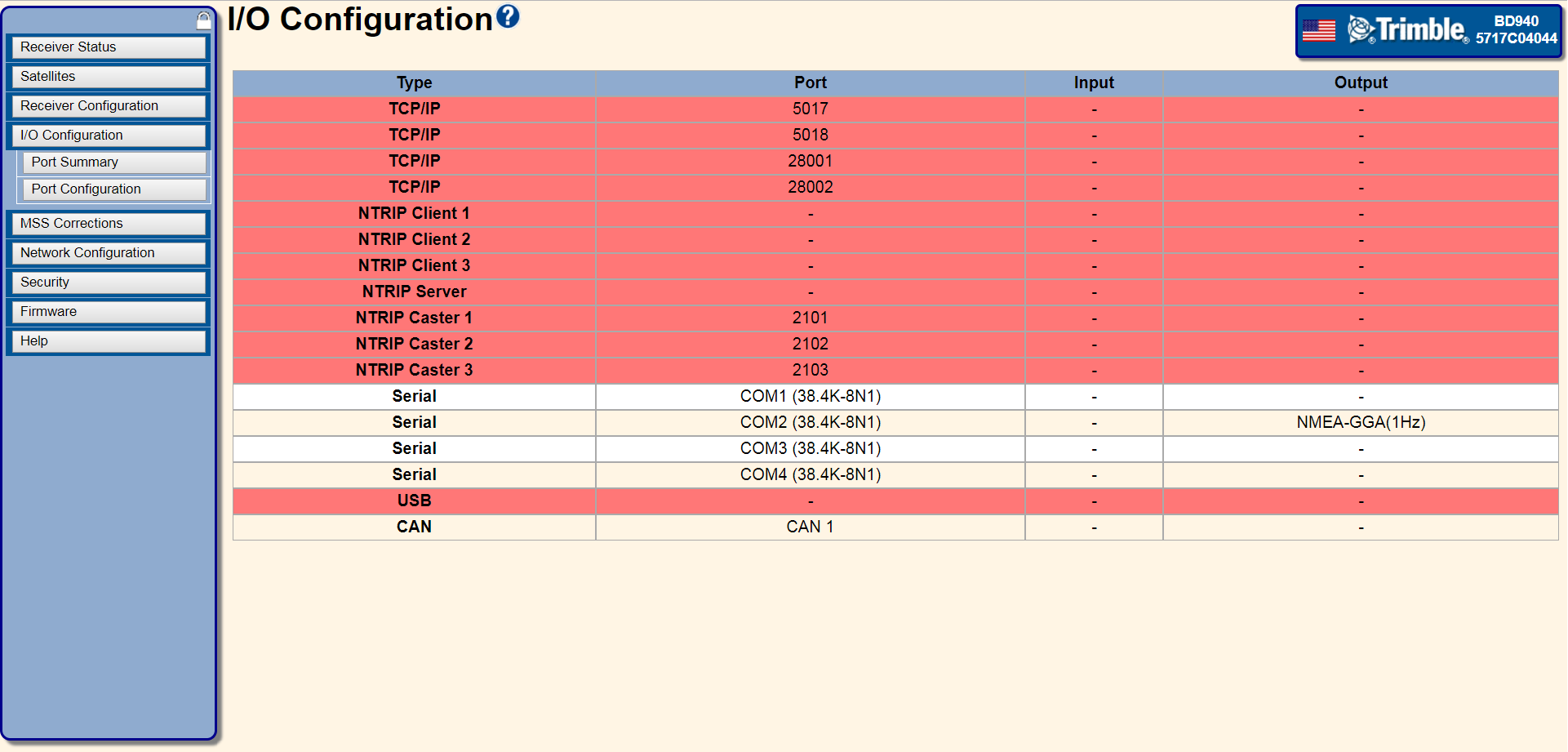
In the I/O Configuration / Port Summary page, verify that the CMR corrections are inputs (if the text is bold then these corrections are being used in the position solution) and verify the output messages:
-
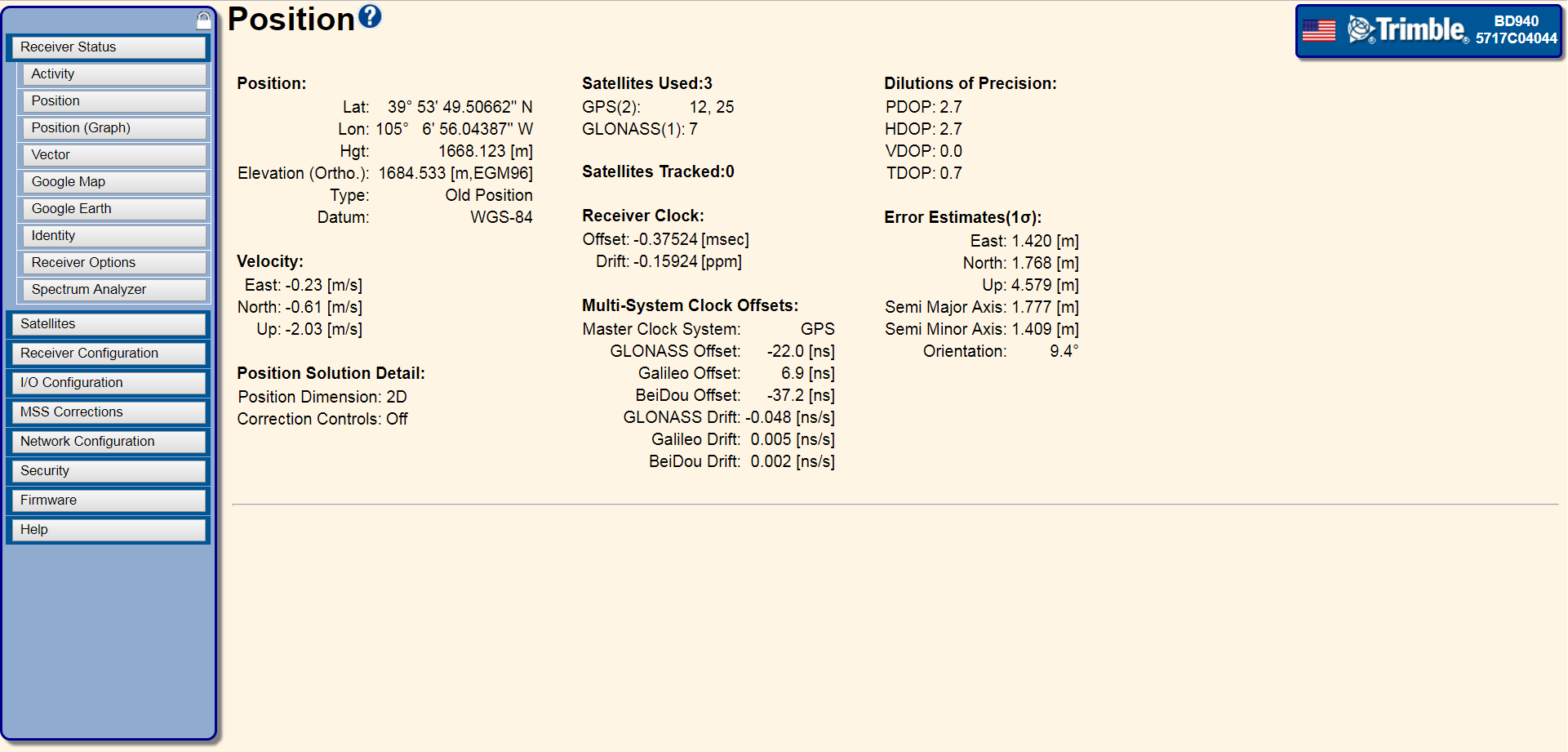
In the Receiver Status / Position page, verify that the rover is tracking satellites and positioning using the input corrections from the base station: