Mobile Mapping System Data Structure
A Trimble MX7 mobile mapping system includes a light GNSS-enabled, six-camera instrument that is mounted on a vehicle.
A Trimble MX9 (or MX90) mobile laser mapping system consists in its standard configuration of two high-end laser scanners, a 360° camera and three oblique cameras (two front looking and one rear downwards looking), and GNSS/IMU system.
A Trimble MX50 mobile laser mapping system consists in its standard configuration of two high-end laser scanners, a 360° camera, and GNSS/IMU system.
A Trimble MX60 mobile laser mapping system consists in its standard configuration of two high-end laser scanners, a 360° camera and one rear downwards looking camera, and GNSS/IMU system.
The data, captured by a mobile (laser) mappingsystem during a data collection campaign (called Mission) by using the TMI (Trimble Mobile Imaging) software, is structured as described hereafter inside a directory which name is defined by:
A - The mobile (laser) mapping system name. The example below shows an MX9 mobile mapping system.
B - The serial number of the system.
C - A unique number (Mission ID) resulting from an increasing mission counter.![]()
Note: The name of a mission is saved as an attribute inside the mission database file. It displays once the corresponding mobile mapping database has been imported into TBC.
The captured data consists of the following:
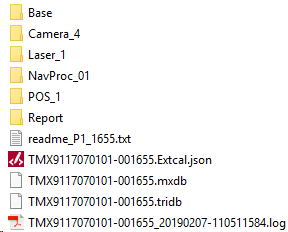
- MX7:
A1 - One Trimble Mobile Imaging (TMI) software database, which links all of the project files (.Tridb).
A2 - Panoramic camera data: One camera folder, Camera_1, with PGR video format files inside (FLIR's proprietary format).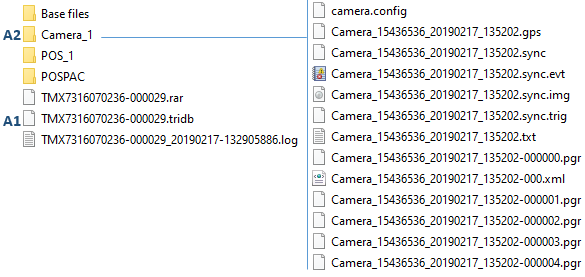
- MX9 and MX90:
B1 - One Trimble Mobile Imaging (TMI) software database, which links all of the project files (.Mxdb).
B2 - Laser data from the two lasers: Two laser folders, Laser_1 and Laser_2, with RXP laser format files inside. RXP is Riegl’s proprietary format for point clouds.
B3 - Panoramic camera data: One camera folder, Camera_4, with PGR video format files inside (FLIR's proprietary format).
B4 - Oblique camera data: Three camera folders, Camera_1 to Camera_3, with MXIPS video format files.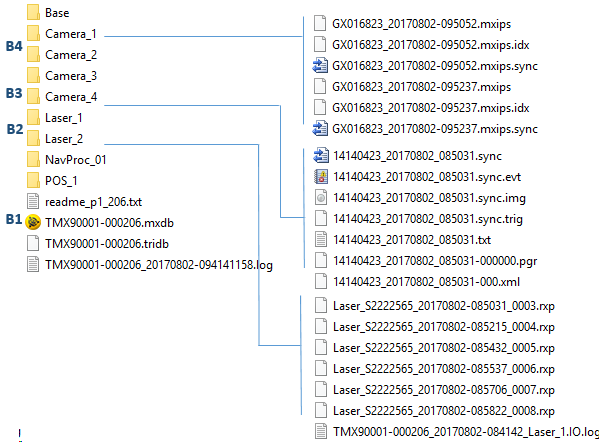
- MX50:
C1 - One Trimble Mobile Imaging (TMI) software database, which links all of the project files (.Mxdb).
C2 - Laser data from the two lasers: Two laser folders, Laser_1 and Laser_2, with TMX laser format files inside.
C3 - Panoramic camera data: One camera folder, Camera_4, with PGR video format files inside (FLIR's proprietary format).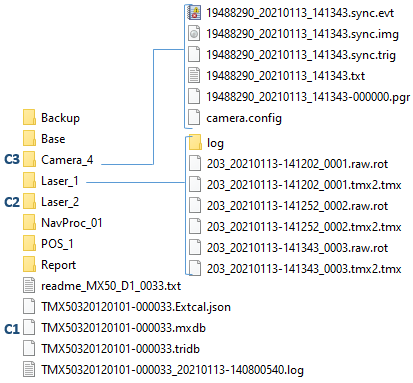
- MX60:
D1 - One Trimble Mobile Imaging (TMI) software database, which links all of the project files (.Mxdb).
D2 - Laser data from the two lasers: Two laser folders, Laser_1 and Laser_2, with TMX laser format files inside. TMX is Trimble’s proprietary format for point clouds.
D3 - Panoramic camera data: One camera folder, Camera_4, with PGR video format files inside (FLIR's proprietary format).
D4 - Oblique camera data: One camera folder, Camera_3, with MXIPS video format files.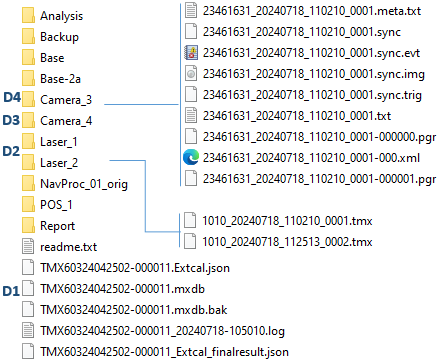
- Navigation and trajectory information (SBET or NAV):
An SBET file is a binary format file from the Applanix company. The data collected in the field with a Trimble MX system, coupled with TMI capture data, has been post-processed with POSPac MMS from Applanix. The result is the processed trajectory file (SBET).
A NAV file is a real-time navigation file for which any post-processed operation has been applied to the trajectory. The real-time trajectory is computed during acquisition. Its accuracy is lower compared to a trajectory processed with SBET; however it is adequate in workflows that do not require a high level of accuracy.

Note: A Trimble MX9 (or MX90) mobile laser mapping system can consist of a single head configuration (one high-end laser scanner and one 360° camera).