View the Mobile Mapping Data in the Project Explorer
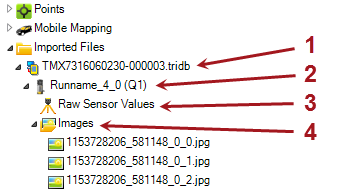
MX7 - After a Trident project file (.tridb) has been imported into TBC, it is represented by an expandable TMI Database node (1 below) nested beneath the Import Files node in the Project Explorer. Nested beneath the TMI Database node are multiple Mobile Mapping Station nodes (2), each representing a different station in the run. Nested beneath each Mobile Mapping Station node is a Raw Sensor Values node (3) that specifies (in the Properties pane) the station setup type and raw orientation information, and an Images node (4) specifying each of the six images captured with the station. The images are balanced and blended to provide a full panoramic view for the station location.
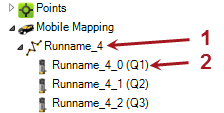
Mobile Mapping Station nodes are also nested beneath one or more Mobile Mapping > Mobile Mapping Run nodes (1 below) in the Project Explorer. Each Mobile Mapping Station node (2) specifies (in the Properties pane) point, image, scan, and location information for a single station in the run.
Note that when importing several Trident project files (.tridb), some runs may have the same name. Run names are not editable in TBC.
Each station point is displayed in an expandable node nested beneath the Points node in the Project Explorer. Point coordinates correspond to the location of the instrument reference point at the capture location.
MX9, MX50, MX60 and MX90 - After a mobile mapping database file (*.mxdb) has been imported into TBC, it is represented by a MXDB database node nested beneath the Import Files node in the Project Explorer.
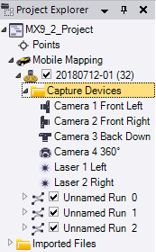
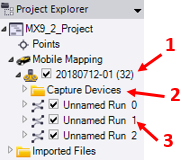
- A Mission node (1), whose name has been entered during the data collection campaign, is nested beneath the Mobile Mapping node, as well as a Capture Devices node (2) and one or more Run nodes (3).
A mission is typically a data collection campaign. The Active Trajectory File of the mission is either the SBET file or the NAV file. The path to either the SBET file or the NAV file is displayed in the Active Trajectory File line in the Properties pane. Click to change it.
to change it. 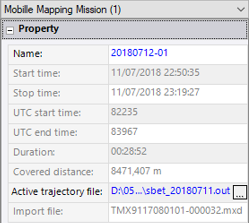
Note: TBC displays the mission's name with the mission ID in brackets (only significant digits (non-zero digits and zeros after non-zero digits). - A Run is the start and end times of a recording of the chosen sensors (lasers, camera 360°, side cameras), which are displayed in the Properties pane. An Imported Trajectory is nested beneath each run node. The example below shows an MX9 mobile mapping system.
The imported trajectory of a run is named with a prefix, SBET if the SBET trajectory has been imported and NAV for the NAV trajectory. The path to either the SBET file or the NAV file is displayed in the Trajectory File line in the Properties pane. You cannot change it. The path is grayed-out.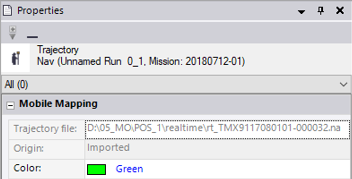
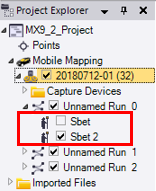
Note: If you change the Active Trajectory of the Mission, a new Imported Trajectory file is created and nested beneath each run node. It is named with a prefix (SBET or NAV) followed by an index.
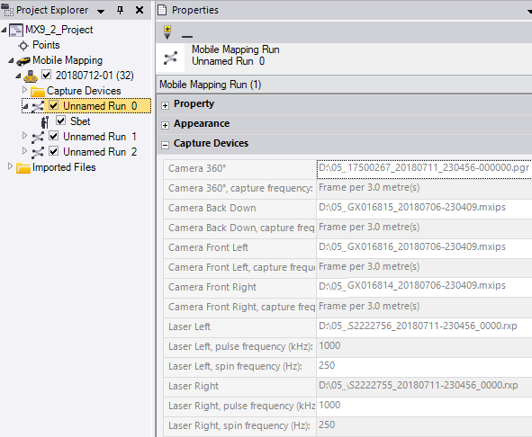
- The Capture Devices folder lists the combination of measurement sensors that are in use during the mission. The example below shows an MX9 mobile mapping system.