Map in local coordinate system
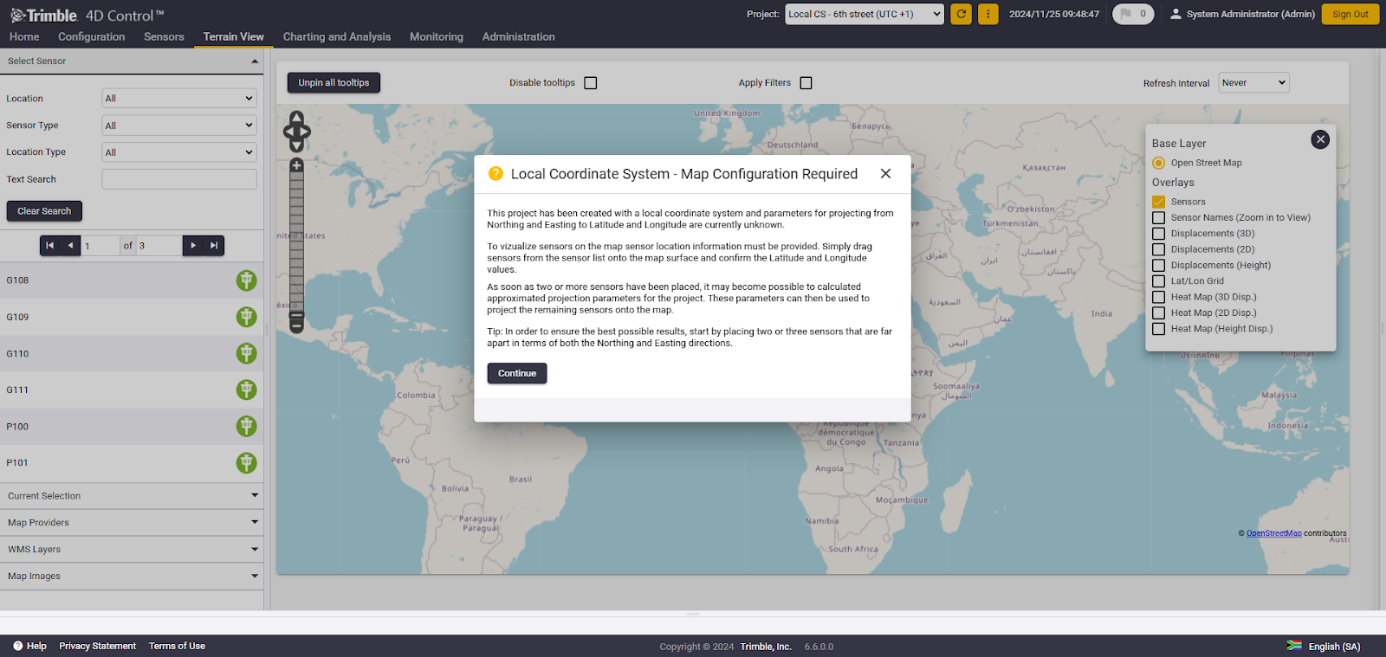
To visualize sensors on the map when the local coordinate system is used, select Maps from the Terrain View menu. Alternatively, click the map icon on the Home page. The first window that opens will give you instructions on how to configure the map view.
Local Coordinate System - Map Configuration Required
This project is created with a local coordinate system and parameters for projecting from Northing and Easting to Latitude and Longitude are currently unknown. To visualize sensors on the map, sensor location information must be provided. Simply drag sensors from the sensor list onto the map surface and confirm the Latitude and Longitude values. Once two or more sensors are placed, it is possible to calculate approximated projection parameters for the project. These parameters can then be used to project the remaining sensors onto the map.
To ensure the best possible results, start by placing two or three sensors that are far apart in both the Northing and Easting directions.
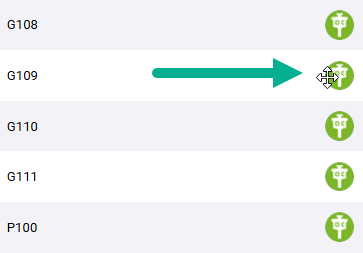
To start placing sensors in the appropriate location on the map, grab the sensor from the sensor list and place it on its location on the map. Once the mouse is on the sensor icon, the pointer will transform into a move pointer, indicating that the sensor can be moved on the map.
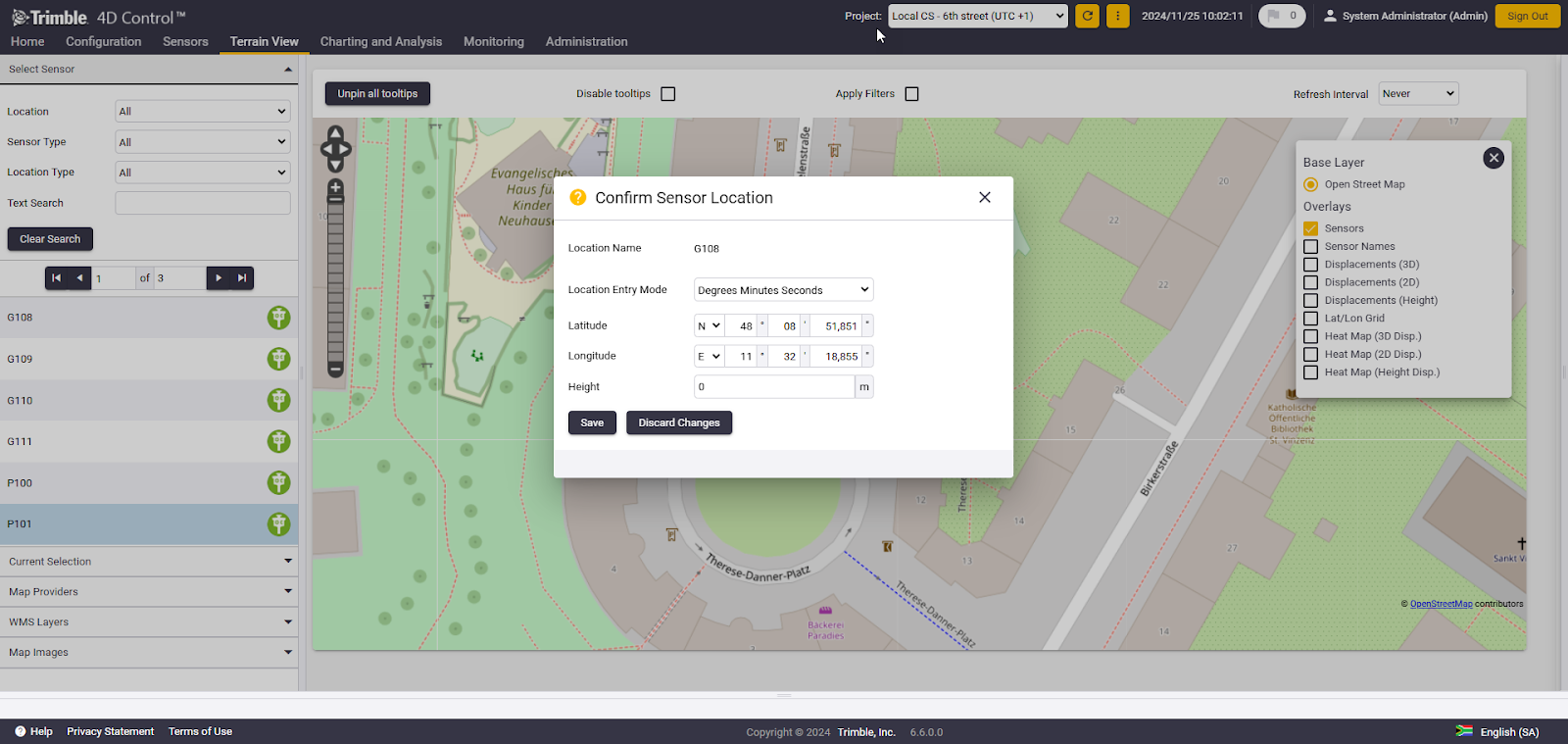
Grab the first sensor and place it on the map. After placing, a Confirm Sensor Location will pop up, offering "fine-tuning" of the sensor location by manually defining the geographic coordinates.
Continue placing the remaining sensors on the map. Depending on the location of the initial sensors placed, two sensors may suffice, but depending on the sensor distribution geometry, additional sensors might be required to accurately calculate the approximate projection parameters. Once enough sensors have been placed on the map, the window 'Approximate Projection Available' appears, indicating that the remaining sensors can now be placed manually on the map.
Approximate Projection Available
Approximate projection parameters were calculated for this project. Click on 'Place Approximated Sensors' to automatically position remaining sensors on the map. Alternatively, you can click on 'Continue' to manually place additional sensors.
Click on Place Approximated Sensors to automatically position all the 'unplaced sensors' on the map, or click Continue to manually place additional sensors.
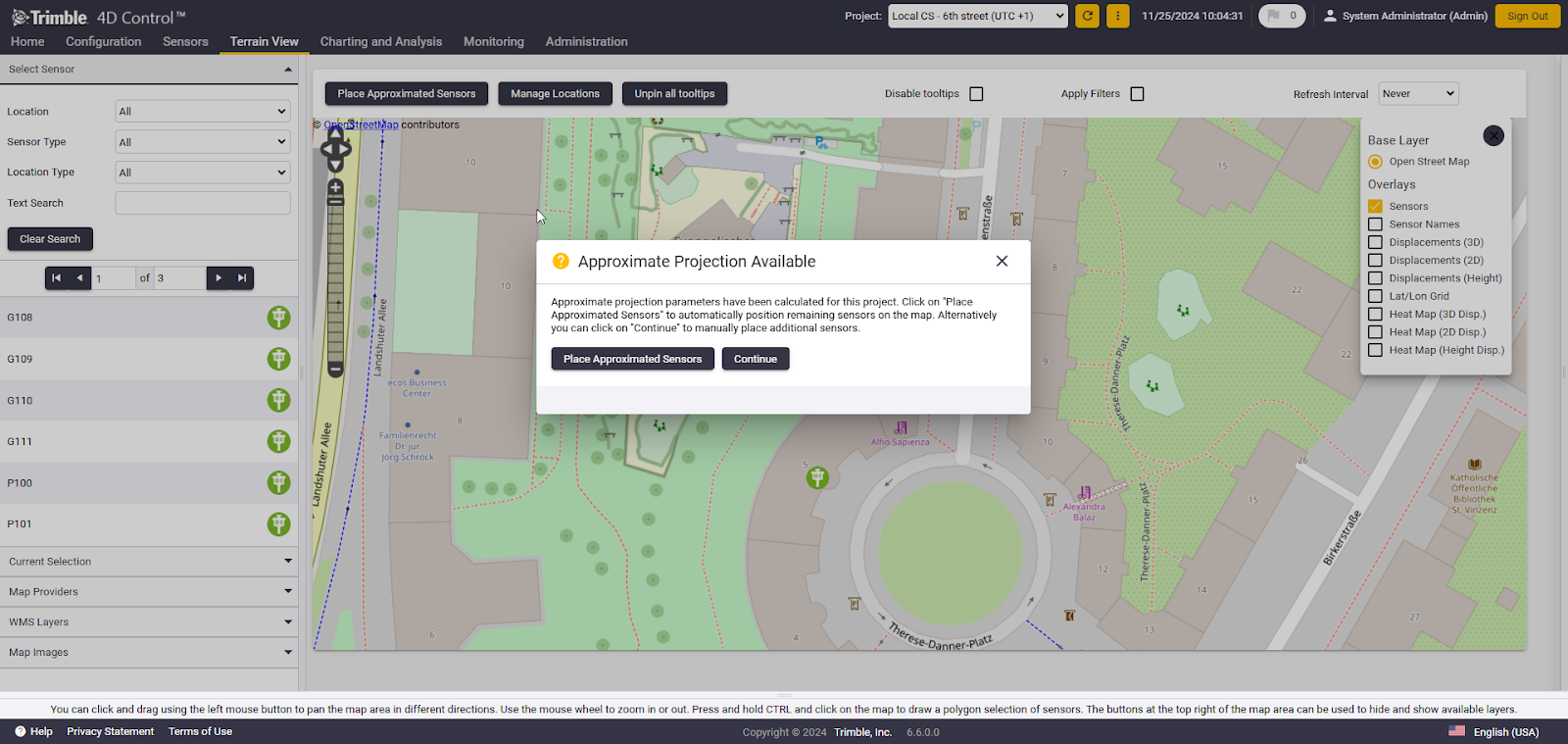
If the user clicks on Continue, additional sensors can be placed manually. The Place Approximated Sensors button will remain available at the top, allowing the user to automatically position the remaining sensors on the map once they are satisfied with the manual placement.

If Place Approximated Sensors is selected, T4D will use the projection parameters calculated from the manually placed sensors to position all remaining unplaced sensors on the map. The image below illustrates the distribution of sensors on the map after two sensors have been placed manually.
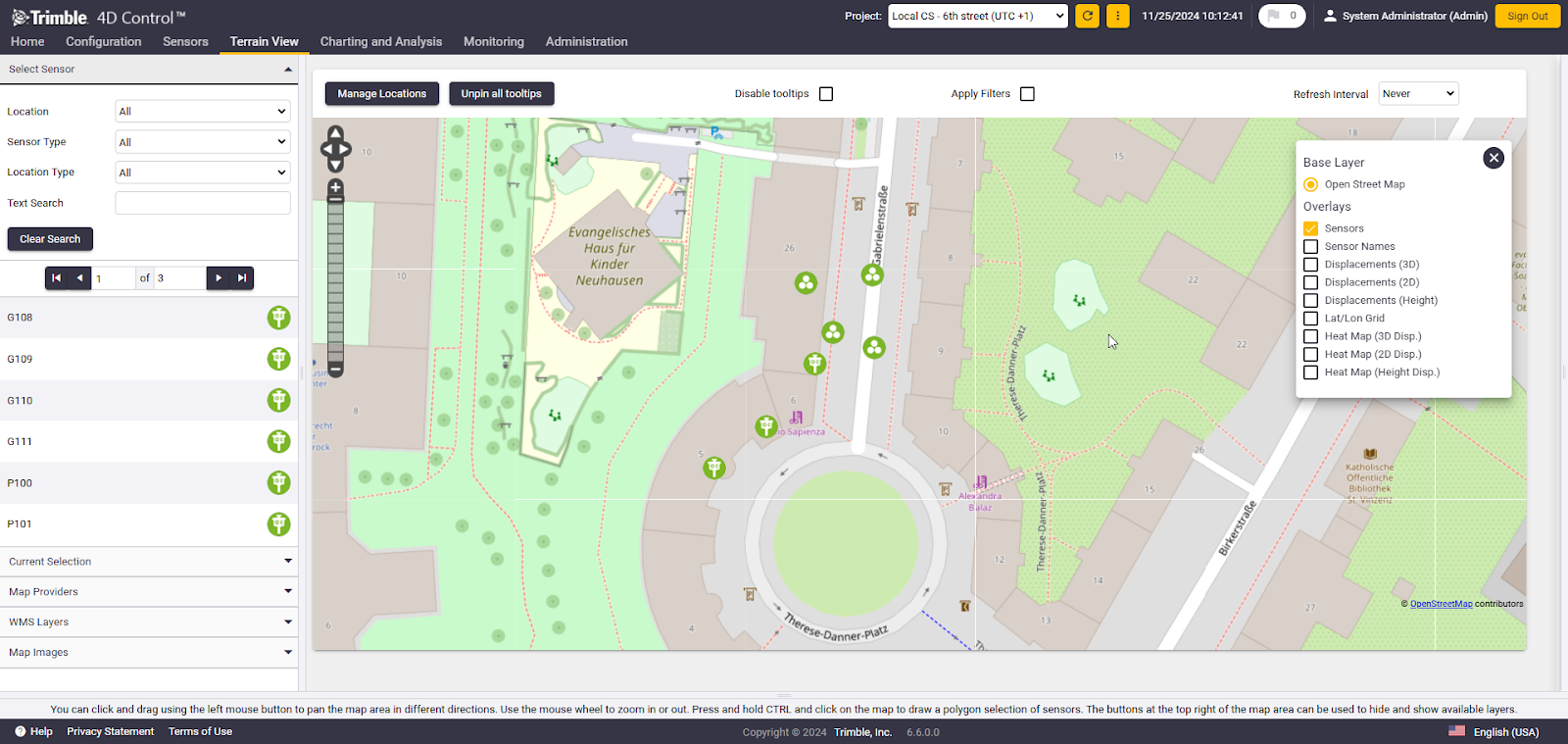
Once all sensors are placed on the map, the Manage Locations button becomes available. This section provides information about the number of unplaced, user-defined, and approximated sensors, as well as a Reset option to remove all sensors from the map. If a user selects the Reset button, all sensors will be removed, allowing you to restart the placement process.
If a new sensor is added to the project in the same local coordinate system, it will be automatically added to the map view using the existing approximated projection parameters.
Sensors can still be moved manually on the map to adjust their locations as needed. However, starting from version 6.6, manually moving a sensor on the map will not update its grid coordinates in the system. This ensures that grid coordinates remain consistent unless explicitly changed.
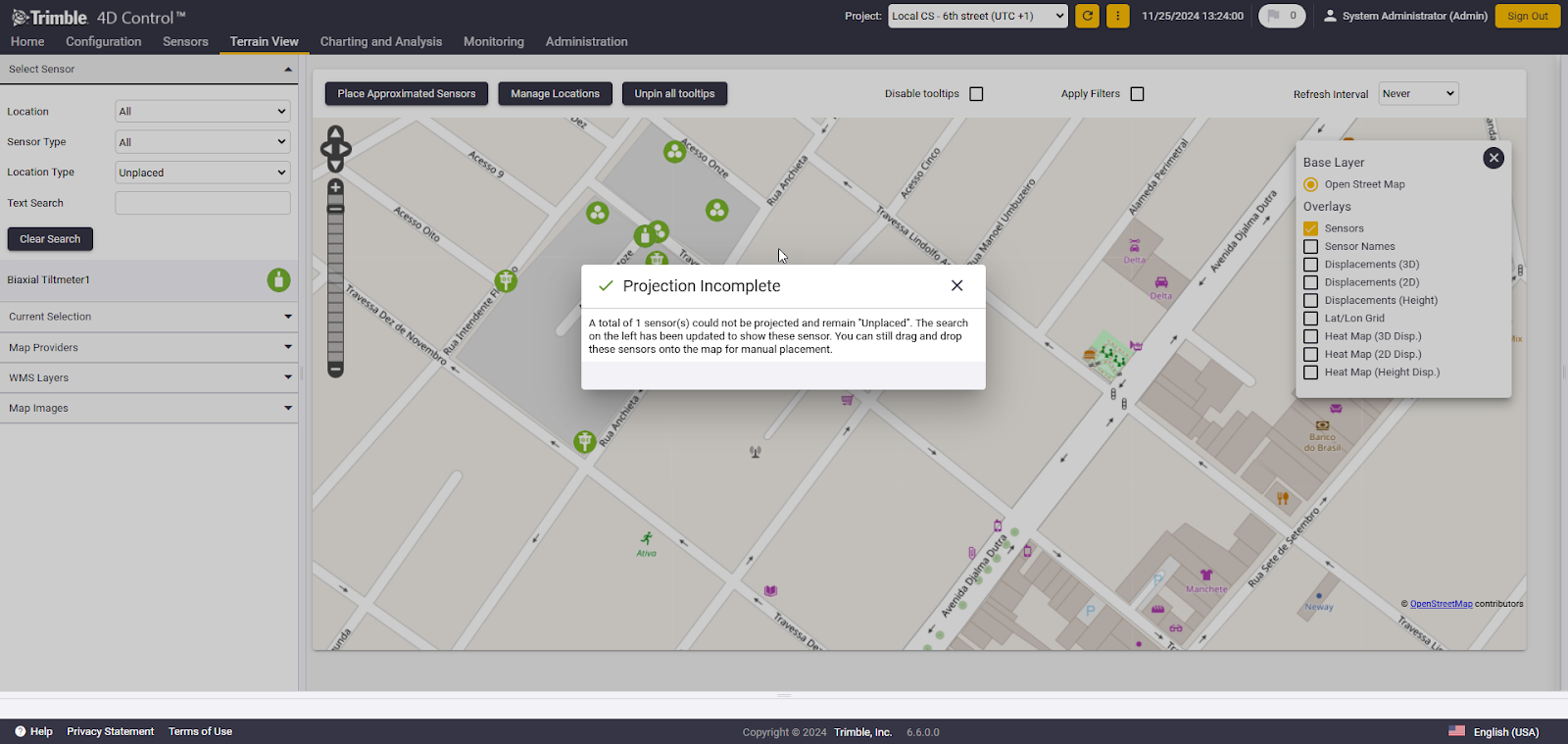
If not all sensors can be distributed on the map based on the calculated projection, a notification will be displayed. Unplaced sensors are automatically filtered in the sensor list. These sensors can then be manually placed on the map, or the placement process can be repeated with a different sensor distribution.