GNSS-antennin korkeuden mittaus
Seuraavissa kohdissa kuvataan, kuinka mitataan mittaussauvaan kiinnitetyn antennin korkeus, kun Mitattu-kentän asetus on Antennin pohjaan tai Antennijalustan pohjaan tai Pikavapautuksen pohjaan.
Ohjelmisto lisää automaattisesti sopivan siirtymäarvon mittausmenetelmälle, jonka valitset, kun syötät antennin korkeusarvon. Voit myös käyttää viitteenä esitettyjä siirtymäarvoja, jos paikalliset määräykset edellyttävät, että lasket APC-korkeuden manuaalisesti maastokirjatarkoituksiin.
Kun mittaat tai merkitset pisteitä IMUn kallistuskompensaatiota käyttämällä varmista, että annettu antennin korkeus ja mittaustapa ovat oikeat. Linjauksen luotettavuus ja paalun kärjen sijainnin luotettavuus erityisesti antennin liikkuessa paalun kärjen ollessa paikoillaan ovat täysin riippuvaisia siitä, että antennin korkeus on oikein. Vaakasijainnin jäännösvirhettä, joka johtuu antennin liikkeestä mittauksen aikana paalun kärjen ollessa paikoillaan, ei voida postaa antennin korkeutta muuttamalla pisteen mittaamisen jälkeen.
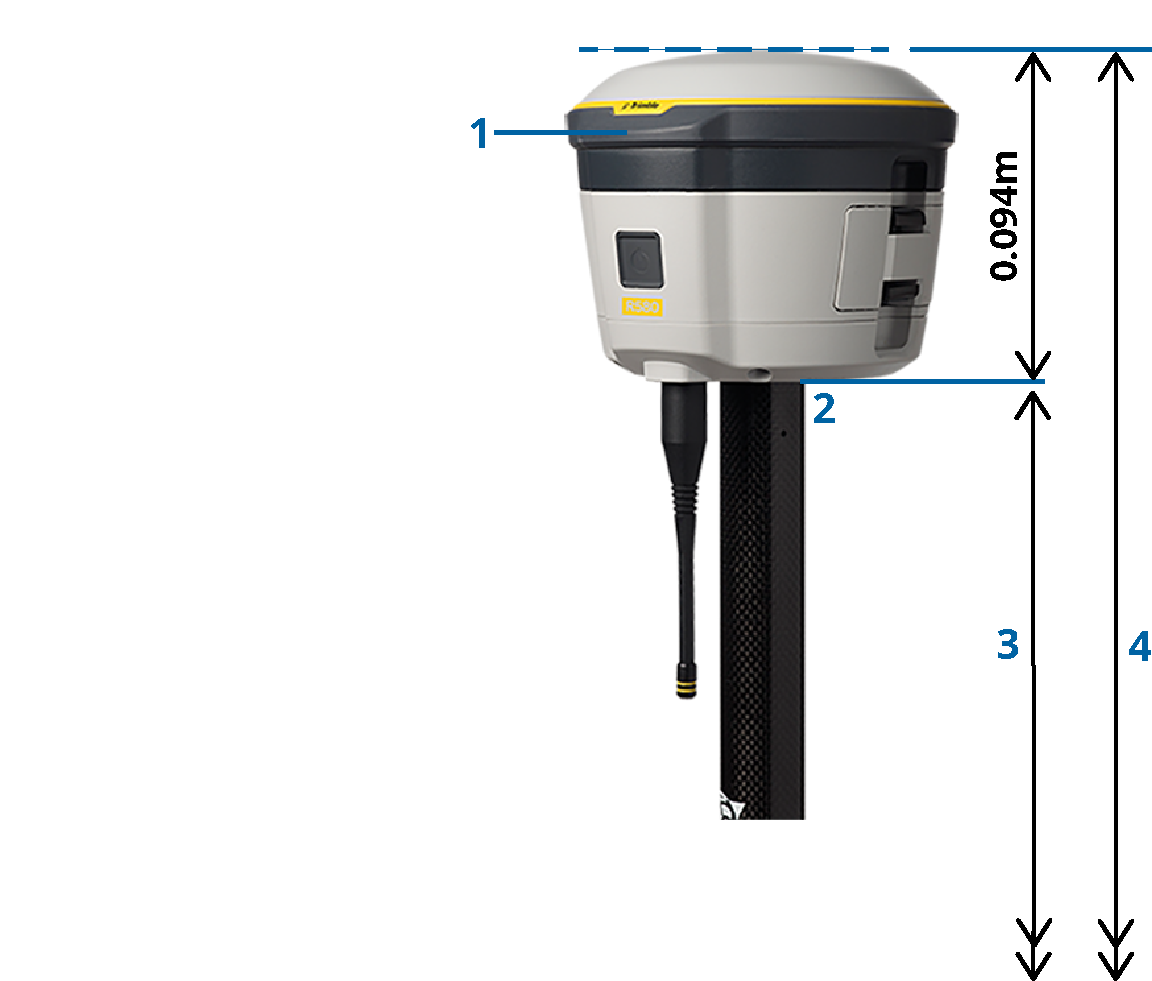
Ohjelmiston kullekin mittausmenetelmälle automaattisesti käyttämien siirtymien osalta katso seuraava kaavio, jossa:
(1) on vastaanotin
(2) on antennin jalustan pohja
(3) on pikavapautuksen pohja
(4) on korjaamaton korkeus mitattuna paalun kärjestä pikavapautuksen pohjaan
(5) on korjattu korkeus APC:hen paalun pohjasta

Seuraavissa kohdissa kuvataan, kuinka vastaanottimen korkeus mitataan käyttäen vastaanottimen vipua silloin, kun vastaanotin on kiinnitetty kolmijalkaan.
Ohjelmiston kullekin mittausmenetelmälle automaattisesti käyttämien siirtymien osalta katso seuraava kaavio, jossa:
(1) on vastaanotin
(2) on laajennuksen vipu
(3) on korjattu korkeus APC:hen maamerkistä
(4) on korjaamaton korkeus mitattuna mittanauhalla tai mittatangolla maamerkistä vivun kärkeen (huomaa, että tämä on kaltevuusmittaus)

Ohjelmiston kullekin mittausmenetelmälle automaattisesti käyttämien siirtymien osalta katso seuraava kaavio, jossa:
(1) on vastaanotin
(2) on antennin jalustan pohja
(3) on pikavapautuksen pohja
(4) on korjaamaton korkeus mitattuna paalun kärjestä pikavapautuksen pohjaan
(5) on korjattu korkeus APC:hen paalun pohjasta

Seuraavissa kohdissa kuvataan, kuinka vastaanottimen korkeus mitataan käyttäen vastaanottimen vipua silloin, kun vastaanotin on kiinnitetty kolmijalkaan.
Ohjelmiston kullekin mittausmenetelmälle automaattisesti käyttämien siirtymien osalta katso seuraava kaavio, jossa:
(1) on vastaanotin
(2) on laajennuksen vipu
(3) on korjattu korkeus APC:hen maamerkistä
(4) on korjaamaton korkeus mitattuna mittanauhalla tai mittatangolla maamerkistä vivun kärkeen (huomaa, että tämä on kaltevuusmittaus)

Kun mittaat tai merkitset pisteitä IMUn kallistuskompensaatiota käyttämällä varmista, että annettu antennin korkeus ja mittaustapa ovat oikeat. Linjauksen luotettavuus ja paalun kärjen sijainnin luotettavuus erityisesti antennin liikkuessa paalun kärjen ollessa paikoillaan ovat täysin riippuvaisia siitä, että antennin korkeus on oikein. Vaakasijainnin jäännösvirhettä, joka johtuu antennin liikkeestä mittauksen aikana paalun kärjen ollessa paikoillaan, ei voida postaa antennin korkeutta muuttamalla pisteen mittaamisen jälkeen.
Ohjelmiston kullekin mittausmenetelmälle automaattisesti käyttämien siirtymien osalta katso seuraava kaavio, jossa:
(1) on vastaanotin
(2) on antennin jalustan pohja
(3) on korjaamaton korkeus mitattuna paalun kärjestä antennin pidikkeen pohjaan
(4) on korjattu korkeus APC:hen paalun pohjasta

Seuraavissa kohdissa kuvataan, kuinka vastaanottimen korkeus mitataan käyttäen vastaanottimen vipua silloin, kun vastaanotin on kiinnitetty kolmijalkaan.
Ohjelmiston kullekin mittausmenetelmälle automaattisesti käyttämien siirtymien osalta katso seuraava kaavio, jossa:
(1) on vastaanotin
(2) on laajennuksen vipu
(3) on korjattu korkeus APC:hen maamerkistä
(4) on korjaamaton korkeus mitattuna mittanauhalla tai mittatangolla maamerkistä vivun kärkeen (huomaa, että tämä on kaltevuusmittaus)

Ohjelmiston kullekin mittausmenetelmälle automaattisesti käyttämien siirtymien osalta katso seuraava kaavio, jossa:
(1) onko vastaanotin kiinnitetty paaluun
(2) on antennin jalustan pohja
(3) on korjaamaton korkeus mitattuna paalun kärjestä antennin pidikkeen pohjaan
(4) on korjattu korkeus APC:hen paalun pohjasta
Tämä osio kattaa muut integroidut Trimble GNSS -vastaanottimet, joita ei ole mainittu yllä, kuten Trimble R8s-, R8-, R6- ja R4-vastaanottimet.
Ohjelmiston kullekin mittausmenetelmälle automaattisesti käyttämien siirtymien osalta katso seuraava kaavio, jossa:
(1) onko vastaanotin kiinnitetty paaluun
(2) on antennin jalustan pohja
(3) on korjaamaton korkeus mitattuna paalun kärjestä antennin pidikkeen pohjaan
(4) on korjattu korkeus APC:hen paalun pohjasta
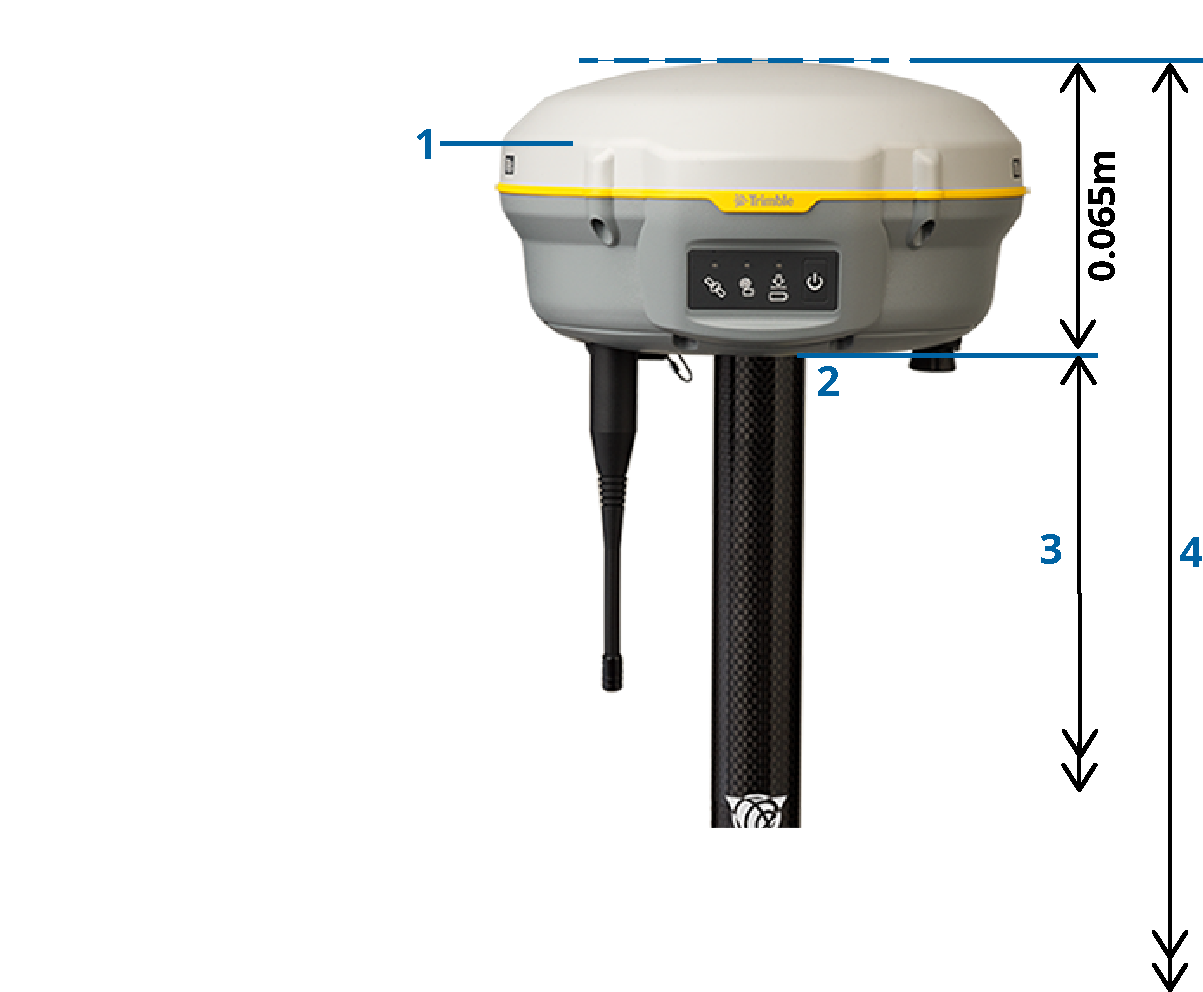
Jos tämä vastaanotin on asennettu jalustalle, mittaa korkeus maamerkistä keltaisen puskurin keskelle antennin harmaan pohjan ja valkoisen yläosan väliin ja valitse puskurin keskipiste Mitattu kohteeseen -kentästä. Huomaa, että tämä on kaltevuusmittaus.
Katso ohjelmiston automaattisesti käyttämät siirtymät seuraavasta kaaviosta, jossa:
(1) on Zephyr 3 Rover -antenni
(2) on antennin jalustan pohja
(3) on korjaamaton korkeus mitattuna paalun kärjestä antennin pohjaan
(4) on korjattu korkeus APC:hen
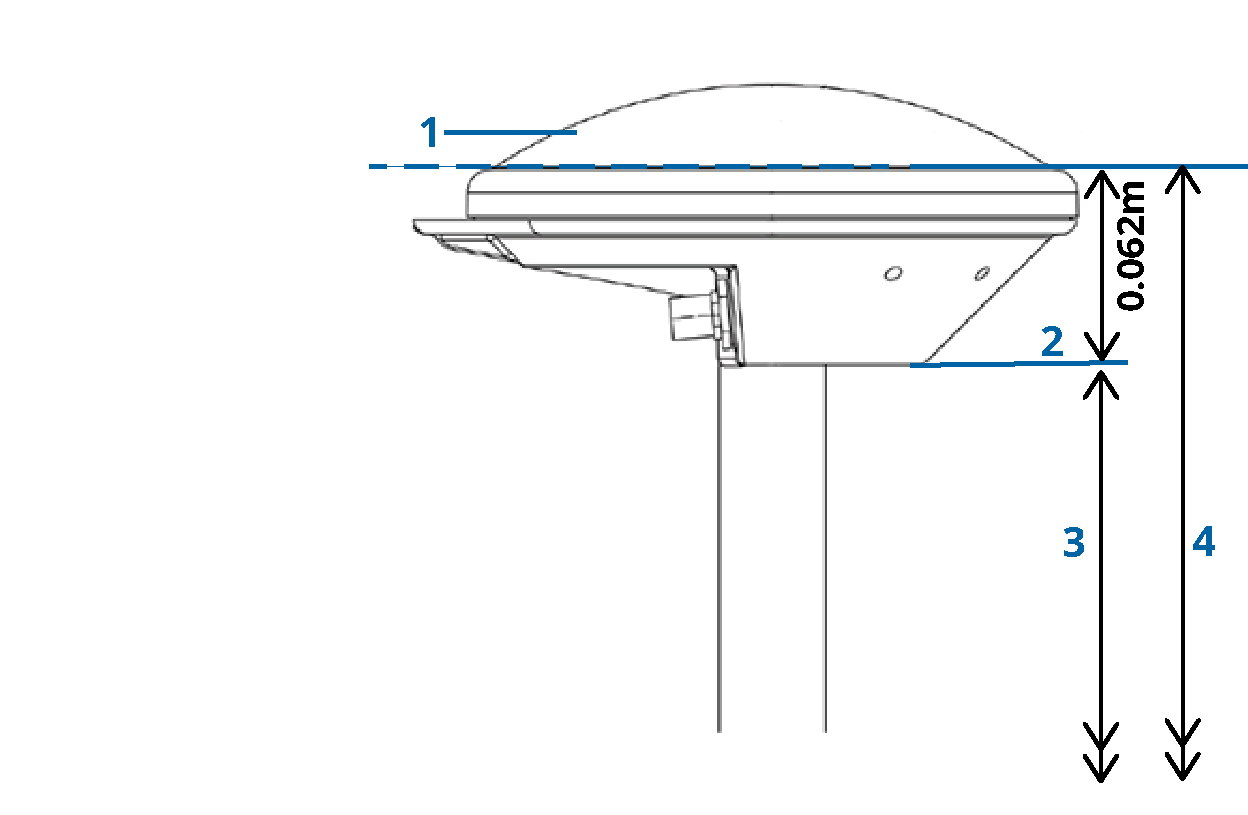
Jos tämä antenni on asennettu kolmijalalle, mittaa korkeus maamerkistä antennin sivulta ulkonevan loven yläosaan.
Jos Zephyr 3 Base -antenni on asennettu kolmijalalle, mittaa korkeus antennin sivulla olevan loven pohjaan.
Katso loven pohjan mittausmenetelmä, kun antenni on kolmijalalla, seuraavasta kaaviosta, jossa:
(1) on Zephyr 3 Base -antenni
2) lovi vaakatason ympärysmitalla
(3) on korjaamaton korkeus maamerkistä loven pohjaan (alapintaan)
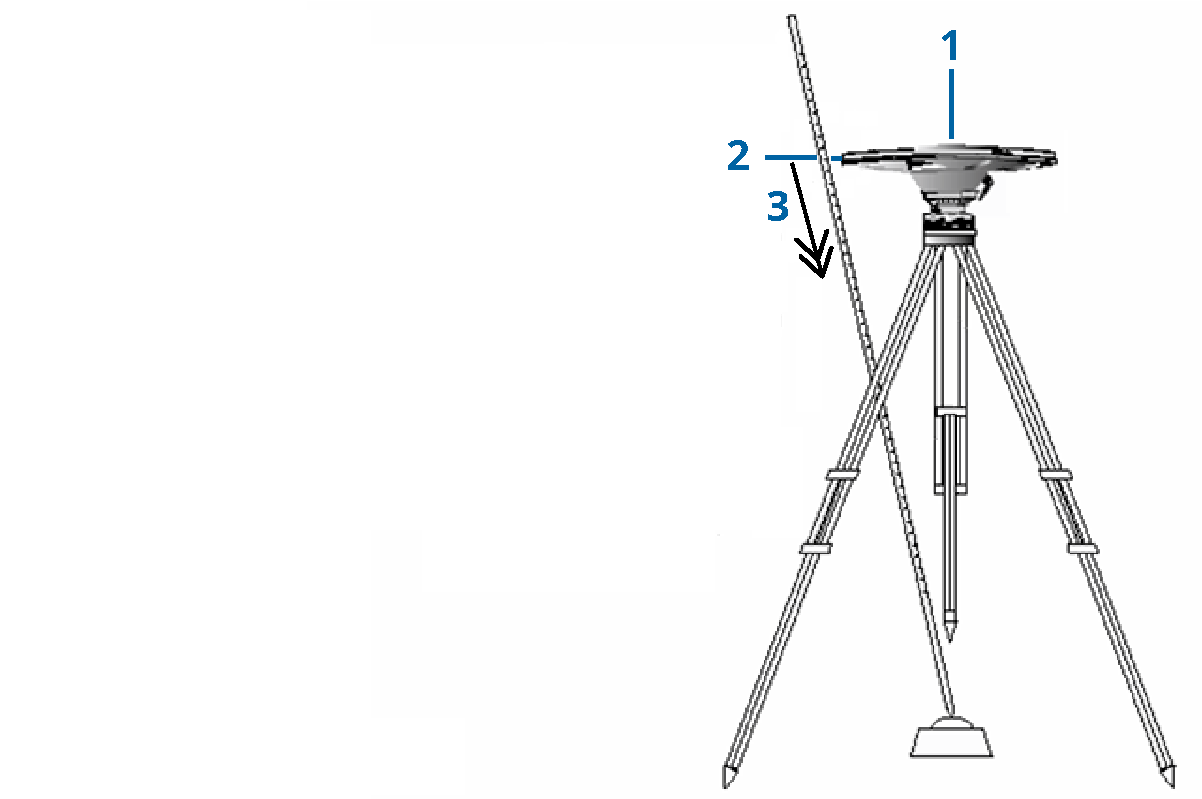
Mittaa korkeus kolmeen eri koloon, jotka sijaitsevat maatason ympärillä. Tallenna sitten keskiarvo korjaamattomana antennikorkeutena.
