Höjdmätning med GNSS-antenn
Ämnet beskriver hur man mäter höjden på en antenn som är monterad på en avståndsstång eller ett stativ när fältet Mätt till är inställt på Antennens nedre del eller Antennfästets nedre del eller Snabbkopplingens nedre del.
I en GNSS-mätning lägger programmet automatiskt till lämpliga offsetvärden för den Mätmetod som du väljer när du anger värdet för Antennhöjd. Du kan även använda de offsetvärden som visas som referens om dina lokala bestämmelser kräver att du beräknar APC-höjden manuellt som en kontroll för fältboksändamål.
Vid mätning eller utsättning av punkter med IMU-lutningskompensation måste du se till att den angivna antennhöjden och mätmetoden är korrekta. Tillförlitligheten och positionen för stångens spets, särskilt vid rörelse av antennen då stångens spets är orörlig, beror helt och hållet på att antennens höjd är korrekt. Residualfel i horisontellt läge som orsakas av antennrörelser vid mätning när stångens spets är orörlig, kan inte tas bort genom att antennhöjden ändras efter att punkten har mätts.
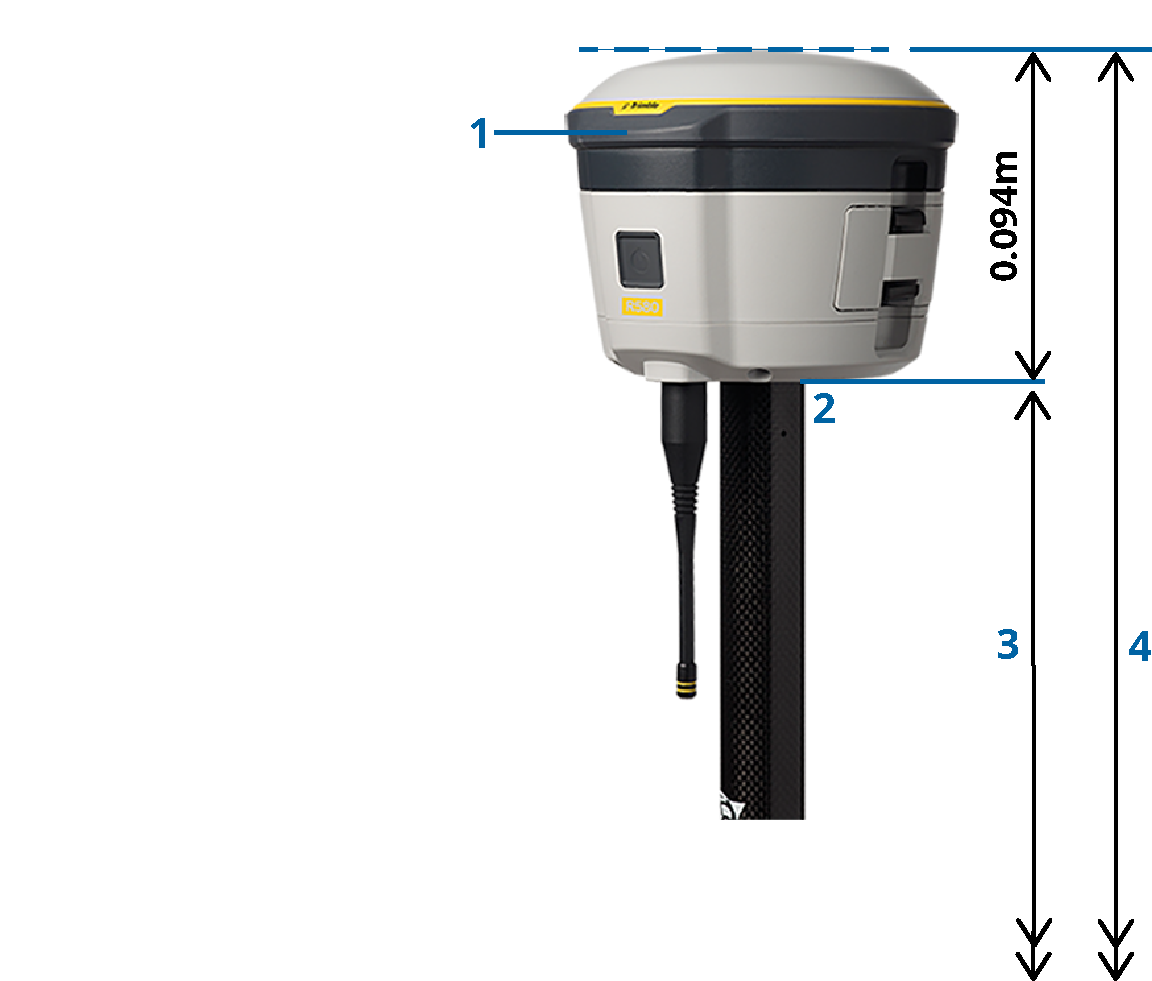
Se följande diagram för de offsets som automatiskt tillämpas av programmet för varje mätmetod, där:
(1) är mottagaren
(2) är antennfästets nedre del
(3) är snabbkopplingens nedre del
(4) är den okorrigerade höjd som mäts från stångens spets till snabbkopplingens nedre del
(5) är den korrigerade höjden till APC från stångens nedre del

Följande visar hur man mäter höjden på en mottagare med hjälp av reglaget på mottagarens förlängning, när mottagaren är monterad på ett trefotsstativ.
Se följande diagram för de offsets som automatiskt tillämpas av programmet för varje mätmetod, där:
(1) är mottagaren
(2) är förlängningsspaken
(3) är den korrigerade höjden till APC från markmärket
(4) är den okorrigerade höjden, mätt med hjälp av ett måttband eller mätstång från markmärket till stångens spets (observera att detta är ett lutningsmått)

Se följande diagram för de offsets som automatiskt tillämpas av programmet för varje mätmetod, där:
(1) är mottagaren
(2) är antennfästets nedre del
(3) är snabbkopplingens nedre del
(4) är den okorrigerade höjd som mäts från stångens spets till snabbkopplingens nedre del
(5) är den korrigerade höjden till APC från stångens nedre del

Följande visar hur man mäter höjden på en mottagare med hjälp av reglaget på mottagarens förlängning, när mottagaren är monterad på ett trefotsstativ.
Se följande diagram för de offsets som automatiskt tillämpas av programmet för varje mätmetod, där:
(1) är mottagaren
(2) är förlängningsspaken
(3) är den korrigerade höjden till APC från markmärket
(4) är den okorrigerade höjden, mätt med hjälp av ett måttband eller mätstång från markmärket till stångens spets (observera att detta är ett lutningsmått)

Vid mätning eller utsättning av punkter med IMU-lutningskompensation måste du se till att den angivna antennhöjden och mätmetoden är korrekta. Tillförlitligheten och positionen för stångens spets, särskilt vid rörelse av antennen då stångens spets är orörlig, beror helt och hållet på att antennens höjd är korrekt. Residualfel i horisontellt läge som orsakas av antennrörelser vid mätning när stångens spets är orörlig, kan inte tas bort genom att antennhöjden ändras efter att punkten har mätts.
Se följande diagram för de offsets som automatiskt tillämpas av programmet för varje mätmetod, där:
(1) är mottagaren
(2) är antennfästets nedre del
(3) är den okorrigerade höjd som mäts från stångens spets till den nedre delen av antennfästet
(4) är den korrigerade höjden till APC från stångens nedre del

Följande visar hur man mäter höjden på en mottagare med hjälp av reglaget på mottagarens förlängning, när mottagaren är monterad på ett trefotsstativ.
Se följande diagram för de offsets som automatiskt tillämpas av programmet för varje mätmetod, där:
(1) är mottagaren
(2) är förlängningsspaken
(3) är den korrigerade höjden till APC från markmärket
(4) är den okorrigerade höjden, mätt med hjälp av ett måttband eller mätstång från markmärket till stångens spets (observera att detta är ett lutningsmått)

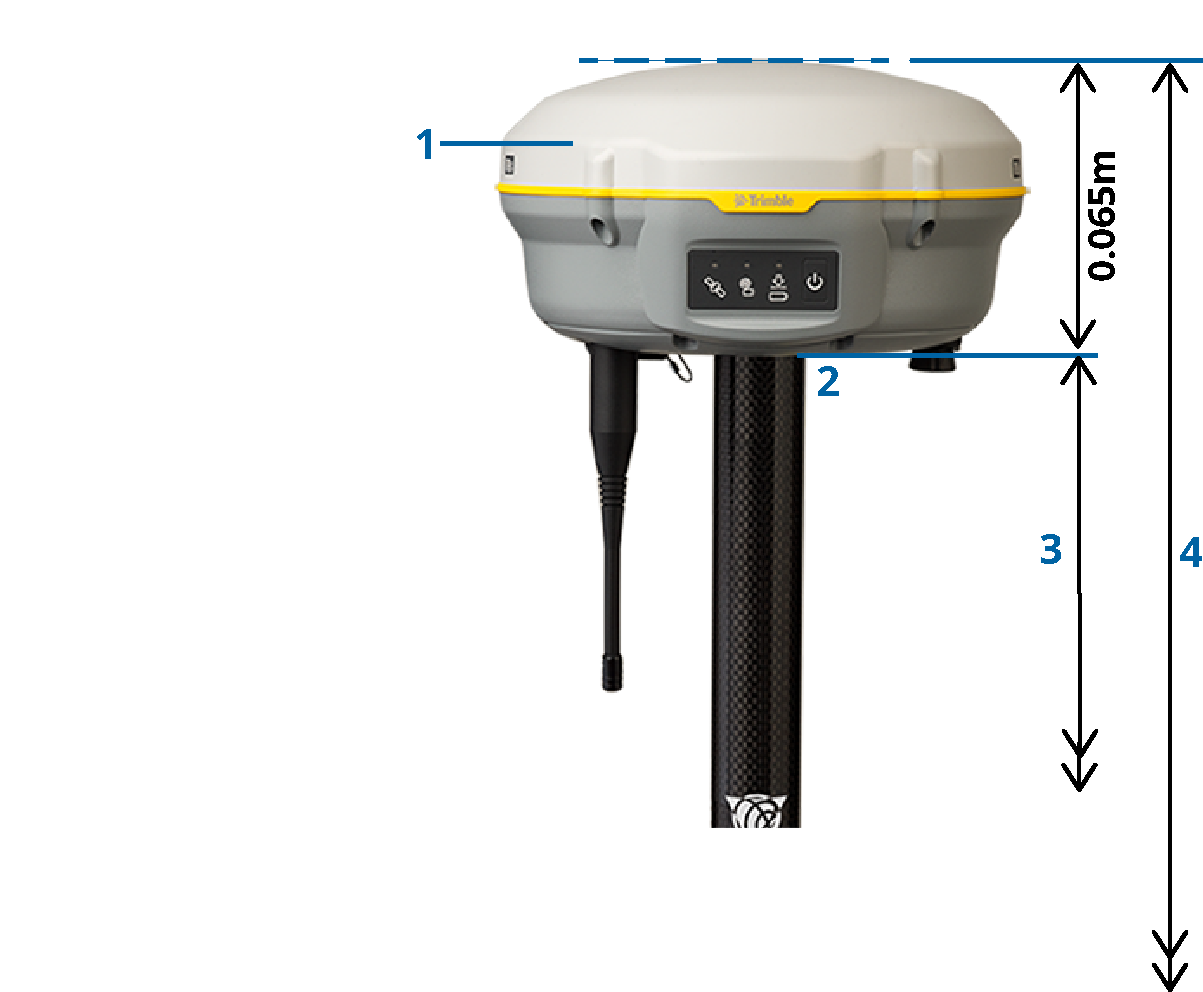
Se följande diagram för de offsets som automatiskt tillämpas av programmet för varje mätmetod, där:
(1) är den mottagare som är monterad på en stång
(2) är antennfästets nedre del
(3) är den okorrigerade höjd som mäts från stångens spets till den nedre delen av antennfästet
(4) är den korrigerade höjden till APC från stångens nedre del
Avsnittet omfattar övriga integrerade GNSS-mottagare från Trimble som inte nämnts ovan, inklusive Trimbles R8s-, R8-, R6- och R4-mottagare.
Se följande diagram för de offsets som automatiskt tillämpas av programmet för varje mätmetod, där:
(1) är den mottagare som är monterad på en stång
(2) är antennfästets nedre del
(3) är den okorrigerade höjd som mäts från stångens spets till den nedre delen av antennfästet
(4) är den korrigerade höjden till APC från stångens nedre del
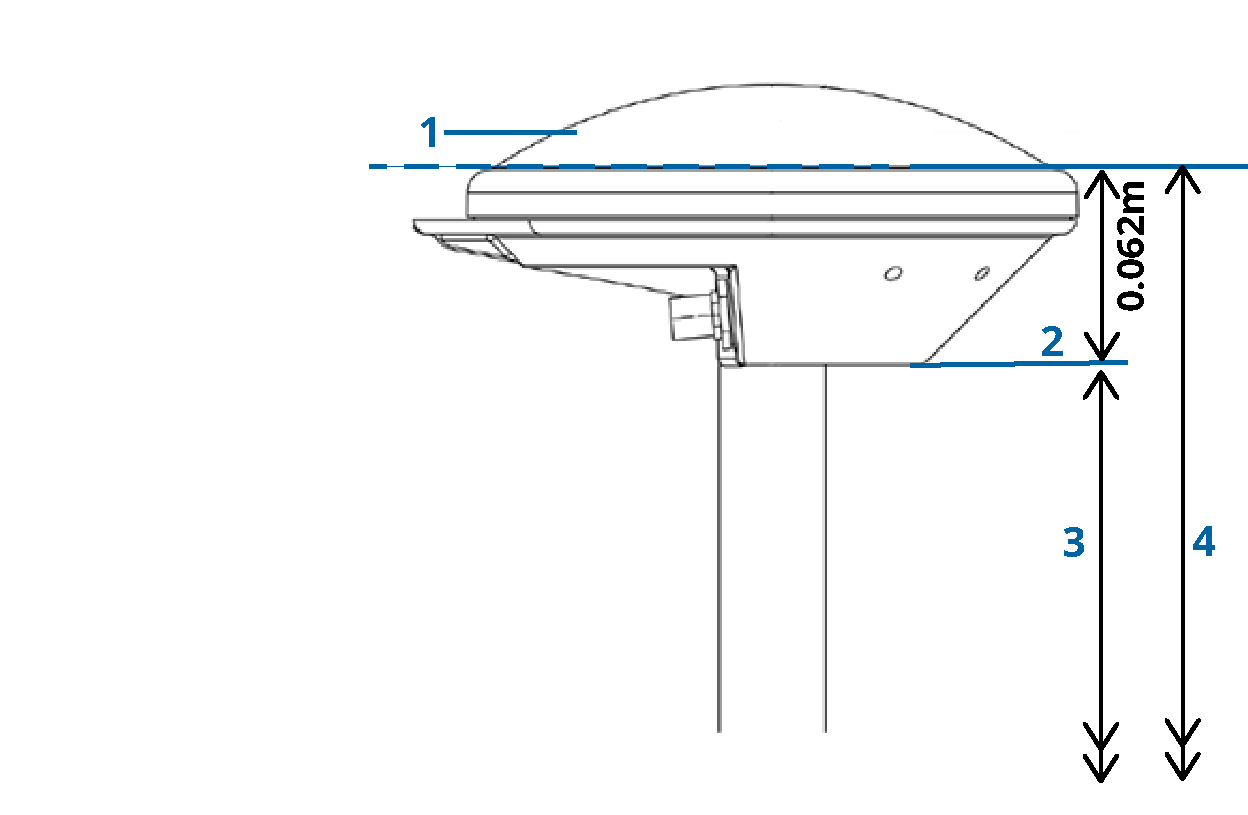
Om mottagaren är monterad på ett stativ mäter du höjden från markmarkeringen till mitten av den gula stötfångaren mellan den grå basen och antennens vita överdel och väljer Stötfångarens centrum i fältet Uppmätt till. Observera att detta är en lutningsmätning.
Se följande diagram för att offsets ska tillämpas automatiskt av programmet, där:
(1) är Zephyr 3 Rover-antennen
(2) är antennfästets nedre del
(3) är den okorrigerade höjd som mäts från stångens spets till antennens nedre del
(4) är den korrigerade höjden till APC
Mät du höjden från markmärket till skårans undersida som sticker ut från antennens sida, om antennen är monterad på ett stativ.
Mät höjden till skårans undersida på sidan av antennen, om Zephyr 3-basantennen är monterad på ett stativ.
Se följande diagram, för mätmetoden Botten av skåran när antennen är monterad på ett stativ, där:
(1) är basantennen på Zephyr 3
(2) skåra på markplanets avgränsning
(3) är den okorrigerade höjden från markplanets markering till skårans undersida
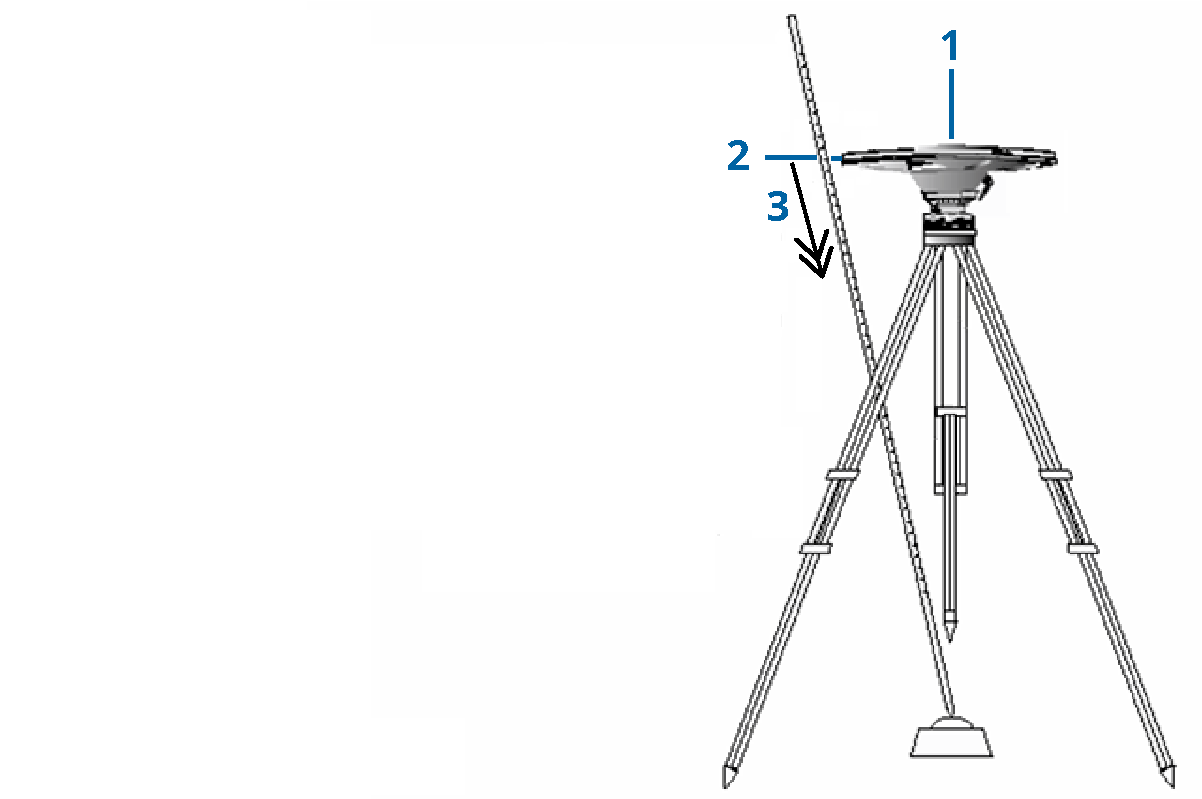
Mät höjden till tre olika spår i planets ytterkant. Registrera sedan medelvärdet som den okorrigerade antennhöjden.
