レーザーラインを自動杭打ちするには
設計ファイルを使用して、または出来形ラインに沿って新しいレーザライン位置を計算して、自動的に採掘鉱面に沿ったレーザラインポイントを杭打ちします。
- レーザラインを作成するには:
マップ内で、ラインを選択してから、自動杭打ち / レーザラインをタップします。
マップ上でボックスをドラッグしレーザラインを選択した場合、レーザライン定義が、ファイルで定義された順番で一覧に表示されます。マップ上で個別にタップして選択した場合、レーザライン定義は、マップで選択された順番で表示されます。
 をタップし、自動杭打ち / レーザーラインを選択し、さらにポイントを選択する方法もあります:
をタップし、自動杭打ち / レーザーラインを選択し、さらにポイントを選択する方法もあります:- 「選択方法」を、「プレフィックス」または「サフィックス」のどちらかに設定し、ジョブにあるポイントの名前のつけ方を統一します。
左ポイント・プレフィックス/サフィックスと右ポイント・プレフィックス/サフィックスを入力ます。次へをタップします。
ジョブ内のマッチするペアのうち正しいプレフィックス/サフィックスの付いたもの全てが一覧表示されます。
ペアにされたポイントは、そのポイント名を使って定義されなければなりません。ポイントには、ラインの左右端を認識させるためのプレフィックスまたはサフィックスがなければなりません。もう片方のポイント名は、ペアとして認識されるために、必ず同じ名前でなければなりません。例えば、左のプレフィックスが L で、右のプレフィックスが R だとすると、以下のようにペアとして認識されます:L1–R1、 L15–R15、 L101–R101など。
- 必要に応じ、杭打ちの必要のないポイントを選択し、削除します。
- 次へをタップします。
ラインの方向を反転させるには、反転をタップします。
- ポイントの詳細および設定の値を入力するか、または初期設定値をそのまま使用します。次へをタップします。
-
次へをタップします。
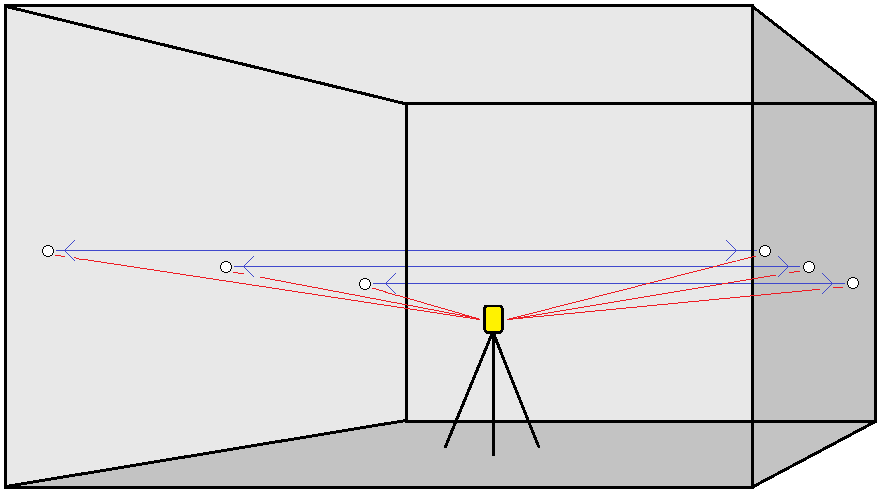
採掘鉱ソフトウェアは、左側にある全てのポイントを杭打ちします。最初のラインから始め、最後のラインで終了します。 その後、全てのポイントを右側に杭打ちをし、最後のラインから始め、最初のラインで終了します。.
ヒント ‑ 機器が正しい方向に向かない場合は、 開始遅延 の間に、機器を手動で正しい方向に向けることができます。
機器は設計ポイントへ向きを合わせ、ある位置を測定してから、この位置を定義された許容値と照らし合わせます。もし許容値から外れていた場合、新たにある位置を決め、同じ手順を許容範囲内になるまで、または最大繰り返し数に達するまで繰り返します。
ソフトウェアは次の座標を探す際に必要なイタレーションを減らすために前の座標を使用しますが。座標が許容差内で見つからない場合、ソフトウェアは次の座標を探す際に必要なイタレーションを減らすために前の座標を使用しません。
-
許容値内に位置が見つかると、ポイントをマークするのイベントが鳴り、次のようになります。
- 機器にトラックライトがある場合、レーザポインタおよびトラックライトは、マーキング用の遅延フィールドで定義された時間にわたり点滅します。
- 機器がTrimble SX12スキャニングトータルステーションの場合、機器がSTDモードに切り替わり、レーザポインタが点滅をやめ、自動的にEDMの位置に移動します。レーザポインタは、マーキング用の遅延フィールドで定義された時間にわたりターゲット照明ライト(TIL)が点滅している間、点灯に変わります。ポイントが保存されると、機器は自動的にTRKモードに戻り、レーザポインタが点滅を再開します。
「マーク遅延」の最後になると、機器は次のポイントを自動杭打ちします。一時停止をタップすると、自動くい打ちプロセスが休止します。「前の」と「次の」ソフトキーを使って、前のポイントや次のポイントにスキップします。
-
ソフトウェアがターゲットの許容範囲内のポイントを見つけるために反復処理を行っている間、反復プロセスを一時停止するには、一時停止をタップします。ソフトウェアは機器を捕捉モードに切り替え、機器のEDM がターゲットに到達するために必要な方向を示す杭打ちデルタを表示します。赤で表示される値は、デルタが許容範囲外であることを示します。コントローラの矢印キーまたはビデオ画面の矢印キーを使用して、機器のEDMをターゲットに近づけます。デルタ値がが黒で表示されたら、保存をタップしてレコードを保存し、自動杭打ちシーケンスを再開して、次のマークステップに進みます。
-
許容範囲内にポイントが見つからないときは、そのポイントはスキップされます。
-
-
この手順が終了すると、「結果」スクリーンに杭打ちされたポイントの数とスキップしたポイントの数が表示されます。
