Intersection Connection Properties
Intersection leg connection properties consist of only one group, which looks different depending on which method is chosen.
|
Selected Leg Connection Properties |
|
Traditional T- X or Y intersection |
|
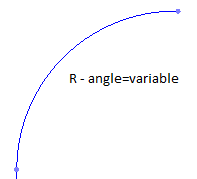
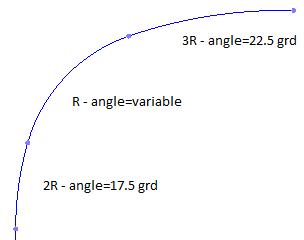
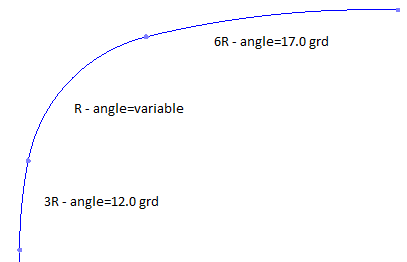
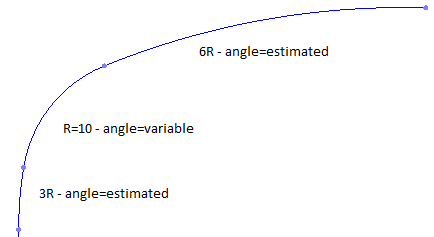
Name - This is the name of current road intersection leg connection. By default, connections are numbered Connections 1-2, Connections 2-3, etc., but if necessary, the names can be defined more specifically. Horizontal turning method - This shows the method used to compute the horizontal connection between two legs. For the traditional T-intersection, there are four methods:
Additional properties: - Delta angle 1 - Specify the angle that determines the length of 3R arcs. - Delta angle 2 - Specify the angle that determines the length of 6R arcs.
Vertical turning method - This shows the method used to compute the vertical connection between two legs. The vertical curve is limited to the horizontal length of the corresponding curvature. For traditional T-intersections, there are five methods:
Maximum vertical grade check - Select Yes if you need to do a grade check on the vertical alignment in the connection curvature. The maximum grade is set to 8 % in the grade check method. |
|
Roundabout tangent connection double radius |
|
Main horizontal turning method - This method is called 'Touch roundabout double radius'. It computes a tangent point to the outer radius of the roundabout by using the two radius values R1-R2 (Turn radius 1 – Turn radius 2). Turn radius 1 - This is the first of the two radii. The value of this radius is the smallest, normally around 15.0 m. Turn radius 2 - This is the second of the two radii. The value of this radius is the largest, normally in the interval from 50-100 m. Main vertical turning method - This vertical method is called 'Copy'. It connects the vertical alignment to the elevation of the outer roundabout at the tangent point. No other methods are available in this case. |
|
Roundabout contra curve connection |
|
Name - This is the name of current road intersection leg connection. By default, connections are numbered Connections 1-2, Connections 2-3, etc., but if necessary, the name can be defined more specifically. Main horizontal turning method - This method is called 'Contra inner circle'. It computes a copy of the outer radius of the roundabout as long as it is a part of the roundabout alignment. In computing access and exit geometry to the roundabout, traditional methods from the leg connection are used, such as:
Main vertical turning method - The vertical method is called 'Copy'. In this case, the method copies the vertical alignment from the outer radius of roundabout. In computing the access and exit geometry to the roundabout, traditional methods from a leg connection are used, such as:
In radius - This is the access radius that is used in the horizontal methods. Incoming horizontal turning method - This is the access method used in the horizontal method. Incoming vertical turning method - This is the access method used in the vertical method. Out radius - This is the exit radius that is used in the horizontal methods. Outgoing horizontal turning method - This is the exit method used in the horizontal method. Outgoing vertical turning method - This is the exit method used in the vertical method. |
|
Roundabout tangent connection |
|
Name - This is the name of current road intersection leg connection. By default, connections are numbered Connections 1-2, Connections 2-3, etc., but if necessary, the name can be defined more specifically. Main horizontal turning method - This method is called 'Touch roundabout'. It computes a tangent point to the outer radius of the roundabout. This means that the turning radius is a variable and will be computed by this method. Main vertical turning method - The vertical method is called 'Copy'. It connects the vertical alignment to the elevation of the outer roundabout at the tangent point. No other methods are available in this case. |





|
Selected Road Intersection Leg Connection Properties |
|
| Road intersection leg connection |
Main horizontal turning method - This method is called 'Touch roundabout double radius'. It computes a tangent point to the outer radius of the roundabout by using the two radii values R1-R2 (Turn radius 1 – Turn radius 2). Turn radius 1 - The first of the two radii. The value of this radius is the smallest, normally around 15.0 m. Turn radius 2 - The second of the two radii. The value of this radius is the largest, normally in the interval from 50-100.0 m. Main vertical turning method - The vertical method is called 'Copy'. The method connects the vertical alignment to the elevation of the outer roundabout at the tangent point. No other methods are available in this case. |
