Calibrate Mobile Mapping Cameras
A system calibration describes the estimation of the exact translation and orientation of each sensor referring to an internal virtual reference point of the sensor head. For a Trimble MX series mobile mapping system, each sensor has its individual set of:
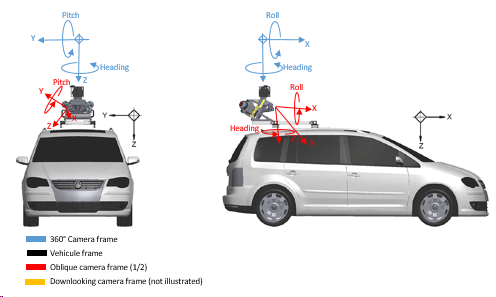
- Lever arms (offsets in translation – X, Y and Z):
X-axis in the driving direction to the front.
Y-axis in the driving direction to the right.
Z-axis in the down direction. - Boresight angles (offsets in orientation around the X, Y, and Z-axes, respectively Roll, Pitch and Heading).
In a calibration process, the offsets in translation are known for all sensors and do not need to be estimated while the offsets in rotation need to be. In TBC, up to the 5.21 version, cameras are calibrated out of the application and the calibration values are imported into TBC from a JSON format file. The Manual Camera Calibration feature allows you to calibrate the cameras of the MX series mobile mapping systems in TBC by entering the calibration values directly.
To calibrate mobile mapping cameras:
- Create a VCE project, and import the mobile mapping data (*.mxdb) and apply the SBET trajectory to it.
- Generate the scan data from at least a run (see Generate Mobile Mapping Scans).
- In the Project Explorer, select a camera from the Capture Devices node.
- From the pop-up menu, select Manual Camera Calibration.
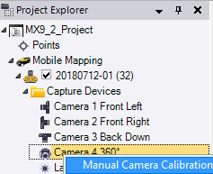
The Manual Camera Calibration command pane displays.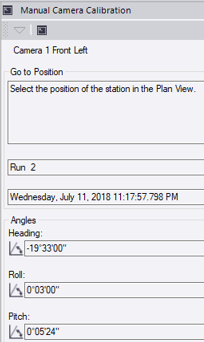
All active trajectories display over the mission’s trajectory. - In the Plan View window, pick a position on the trajectory of a run.
The corresponding camera view displays at the picked location in Full mode.
The Manual Camera Calibration dialog displays the name of the picked run, and the Timestamp information of the picked location. - In the Manual Camera Calibration pane, enter a value in one of the fields (Heading, or Pitch, or Roll) and press Enter.
- Or use the following keys:
Up and Down arrow: ± 0.001°
Ctrl + Up/Down arrow: ±0.01°
Page Up/Page Down: ±0.01°
Mouse wheel Up/Down: ±0.001°
Ctrl + mouse wheel Up/Down: ±0.01° - If required, undo the operation and redo with new value(s).
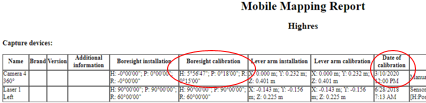
The selected camera view updates immediately. The calibrations values can be found:
When displaying the properties of the camera in the Boresight Refinement line.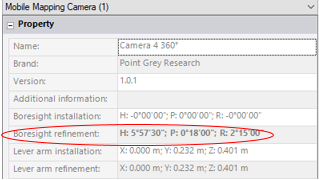
When running a report.